 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving 6D Object Pose Estimation of metallic Household and Industry Objects
Mar 05, 2025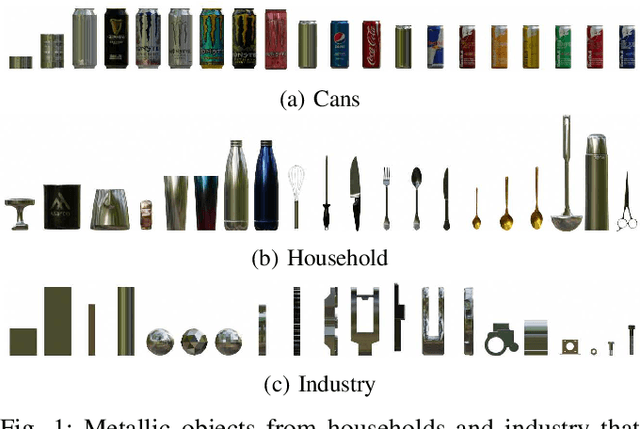
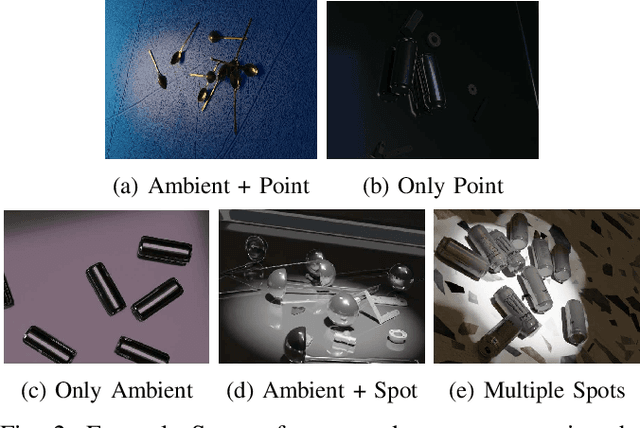

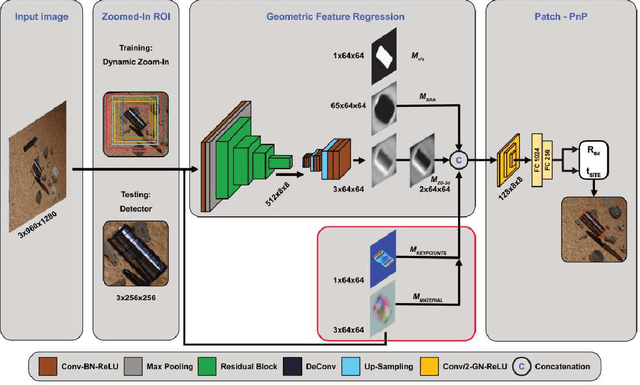
6D object pose estimation suffers from reduced accuracy when applied to metallic objects. We set out to improve the state-of-the-art by addressing challenges such as reflections and specular highlights in industrial applications. Our novel BOP-compatible dataset, featuring a diverse set of metallic objects (cans, household, and industrial items) under various lighting and background conditions, provides additional geometric and visual cues. We demonstrate that these cues can be effectively leveraged to enhance overall performance. To illustrate the usefulness of the additional features, we improve upon the GDRNPP algorithm by introducing an additional keypoint prediction and material estimator head in order to improve spatial scene understanding. Evaluations on the new dataset show improved accuracy for metallic objects, supporting the hypothesis that additional geometric and visual cues can improve learning.
EfficientPose 6D: Scalable and Efficient 6D Object Pose Estimation
Feb 19, 2025In industrial applications requiring real-time feedback, such as quality control and robotic manipulation, the demand for high-speed and accurate pose estimation remains critical. Despite advances improving speed and accuracy in pose estimation, finding a balance between computational efficiency and accuracy poses significant challenges in dynamic environments. Most current algorithms lack scalability in estimation time, especially for diverse datasets, and the state-of-the-art (SOTA) methods are often too slow. This study focuses on developing a fast and scalable set of pose estimators based on GDRNPP to meet or exceed current benchmarks in accuracy and robustness, particularly addressing the efficiency-accuracy trade-off essential in real-time scenarios. We propose the AMIS algorithm to tailor the utilized model according to an application-specific trade-off between inference time and accuracy. We further show the effectiveness of the AMIS-based model choice on four prominent benchmark datasets (LM-O, YCB-V, T-LESS, and ITODD).
End-to-End Probabilistic Geometry-Guided Regression for 6DoF Object Pose Estimation
Sep 18, 20246D object pose estimation is the problem of identifying the position and orientation of an object relative to a chosen coordinate system, which is a core technology for modern XR applications. State-of-the-art 6D object pose estimators directly predict an object pose given an object observation. Due to the ill-posed nature of the pose estimation problem, where multiple different poses can correspond to a single observation, generating additional plausible estimates per observation can be valuable. To address this, we reformulate the state-of-the-art algorithm GDRNPP and introduce EPRO-GDR (End-to-End Probabilistic Geometry-Guided Regression). Instead of predicting a single pose per detection, we estimate a probability density distribution of the pose. Using the evaluation procedure defined by the BOP (Benchmark for 6D Object Pose Estimation) Challenge, we test our approach on four of its core datasets and demonstrate superior quantitative results for EPRO-GDR on LM-O, YCB-V, and ITODD. Our probabilistic solution shows that predicting a pose distribution instead of a single pose can improve state-of-the-art single-view pose estimation while providing the additional benefit of being able to sample multiple meaningful pose candidates.