 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Assess Danger from Movies for Cooperative Escape Planning in Hazardous Environments
Jul 27, 2022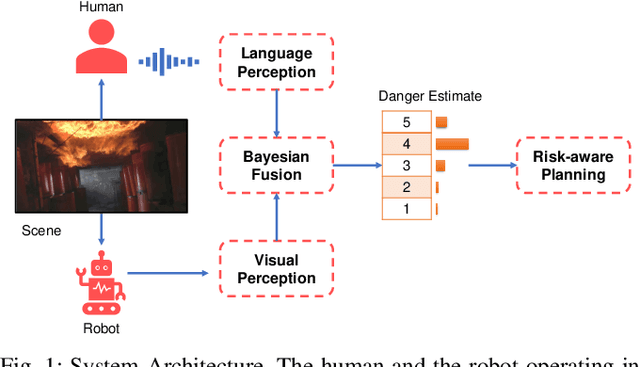
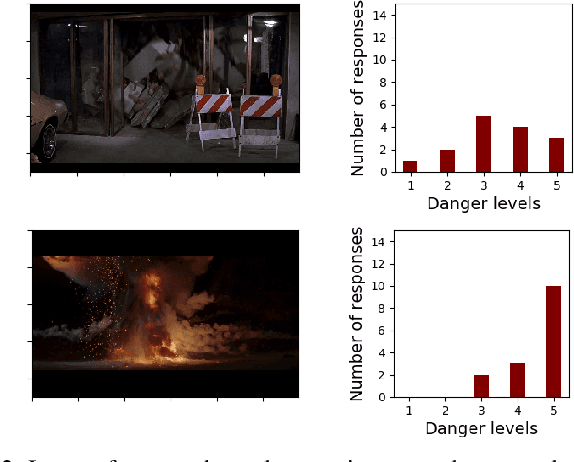

There has been a plethora of work towards improving robot perception and navigation, yet their application in hazardous environments, like during a fire or an earthquake, is still at a nascent stage. We hypothesize two key challenges here: first, it is difficult to replicate such scenarios in the real world, which is necessary for training and testing purposes. Second, current systems are not fully able to take advantage of the rich multi-modal data available in such hazardous environments. To address the first challenge, we propose to harness the enormous amount of visual content available in the form of movies and TV shows, and develop a dataset that can represent hazardous environments encountered in the real world. The data is annotated with high-level danger ratings for realistic disaster images, and corresponding keywords are provided that summarize the content of the scene. In response to the second challenge, we propose a multi-modal danger estimation pipeline for collaborative human-robot escape scenarios. Our Bayesian framework improves danger estimation by fusing information from robot's camera sensor and language inputs from the human. Furthermore, we augment the estimation module with a risk-aware planner that helps in identifying safer paths out of the dangerous environment. Through extensive simulations, we exhibit the advantages of our multi-modal perception framework that gets translated into tangible benefits such as higher success rate in a collaborative human-robot mission.