 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic UAV-based Airport Pavement Inspection Using Mixed Real and Virtual Scenarios
Jan 11, 2024Runway and taxiway pavements are exposed to high stress during their projected lifetime, which inevitably leads to a decrease in their condition over time. To make sure airport pavement condition ensure uninterrupted and resilient operations, it is of utmost importance to monitor their condition and conduct regular inspections. UAV-based inspection is recently gaining importance due to its wide range monitoring capabilities and reduced cost. In this work, we propose a vision-based approach to automatically identify pavement distress using images captured by UAVs. The proposed method is based on Deep Learning (DL) to segment defects in the image. The DL architecture leverages the low computational capacities of embedded systems in UAVs by using an optimised implementation of EfficientNet feature extraction and Feature Pyramid Network segmentation. To deal with the lack of annotated data for training we have developed a synthetic dataset generation methodology to extend available distress datasets. We demonstrate that the use of a mixed dataset composed of synthetic and real training images yields better results when testing the training models in real application scenarios.
* 12 pages, 6 figures, published in proceedings of 15th International Conference on Machine Vision (ICMV)
Methodology for generating synthetic labeled datasets for visual container inspection
Jun 26, 2023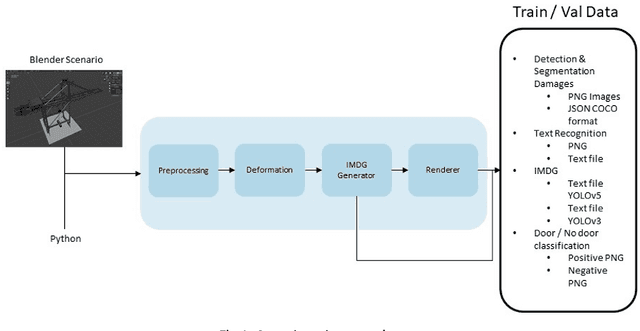

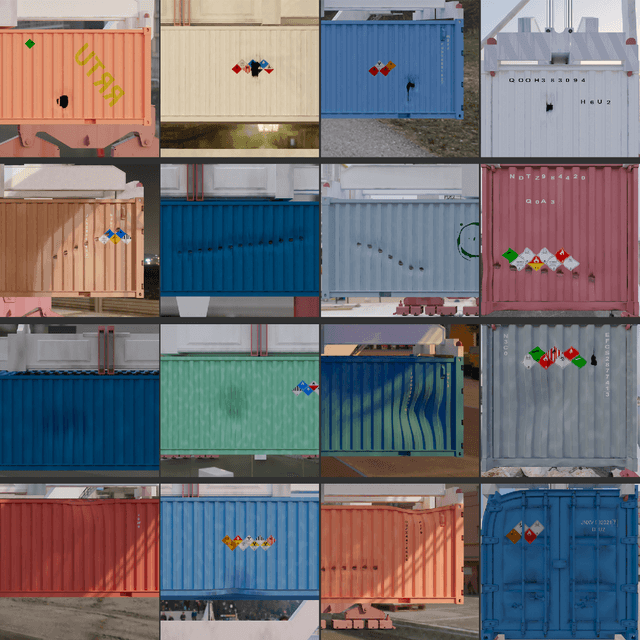

Nowadays, containerized freight transport is one of the most important transportation systems that is undergoing an automation process due to the Deep Learning success. However, it suffers from a lack of annotated data in order to incorporate state-of-the-art neural network models to its systems. In this paper we present an innovative methodology to generate a realistic, varied, balanced, and labelled dataset for visual inspection task of containers in a dock environment. In addition, we validate this methodology with multiple visual tasks recurrently found in the state of the art. We prove that the generated synthetic labelled dataset allows to train a deep neural network that can be used in a real world scenario. On the other side, using this methodology we provide the first open synthetic labelled dataset called SeaFront available in: https://datasets.vicomtech.org/di21-seafront/readme.txt.