 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnomaly Detection in Road Traffic Using Visual Surveillance: A Survey
Jan 24, 2019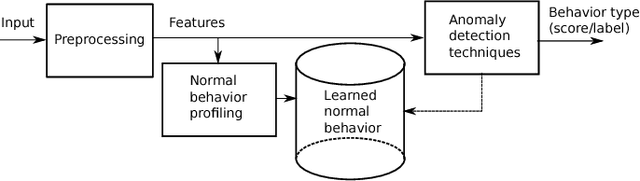
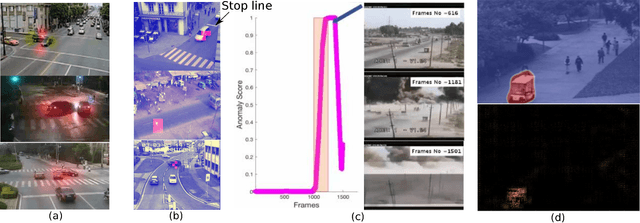
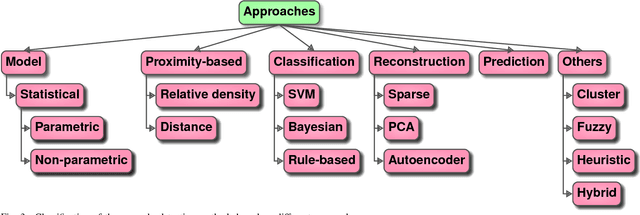
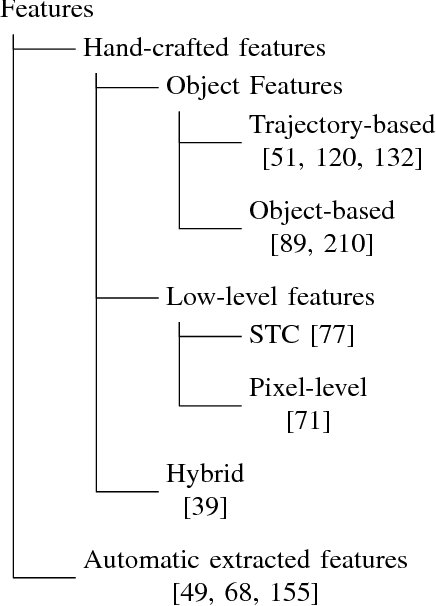
Computer vision has evolved in the last decade as a key technology for numerous applications replacing human supervision. In this paper, we present a survey on relevant visual surveillance related researches for anomaly detection in public places, focusing primarily on roads. Firstly, we revisit the surveys done in the last 10 years in this field. Since the underlying building block of a typical anomaly detection is learning, we emphasize more on learning methods applied on video scenes. We then summarize the important contributions made during last six years on anomaly detection primarily focusing on features, underlying techniques, applied scenarios and types of anomalies using single static camera. Finally, we discuss the challenges in the computer vision related anomaly detection techniques and some of the important future possibilities.
Video Trajectory Classification and Anomaly Detection Using Hybrid CNN-VAE
Dec 18, 2018
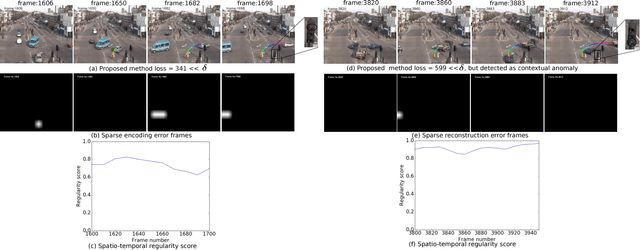
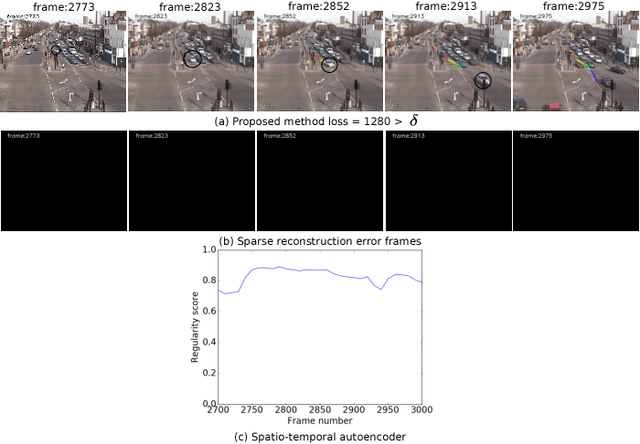
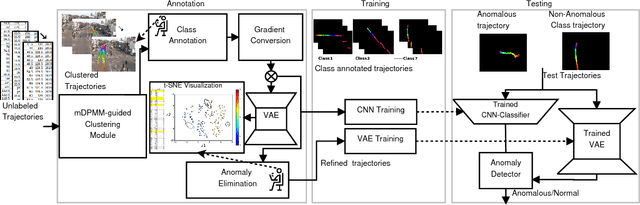
Classifying time series data using neural networks is a challenging problem when the length of the data varies. Video object trajectories, which are key to many of the visual surveillance applications, are often found to be of varying length. If such trajectories are used to understand the behavior (normal or anomalous) of moving objects, they need to be represented correctly. In this paper, we propose video object trajectory classification and anomaly detection using a hybrid Convolutional Neural Network (CNN) and Variational Autoencoder (VAE) architecture. First, we introduce a high level representation of object trajectories using color gradient form. In the next stage, a semi-supervised way to annotate moving object trajectories extracted using Temporal Unknown Incremental Clustering (TUIC), has been applied for trajectory class labeling. Anomalous trajectories are separated using t-Distributed Stochastic Neighbor Embedding (t-SNE). Finally, a hybrid CNN-VAE architecture has been used for trajectory classification and anomaly detection. The results obtained using publicly available surveillance video datasets reveal that the proposed method can successfully identify some of the important traffic anomalies such as vehicles not following lane driving, sudden speed variations, abrupt termination of vehicle movement, and vehicles moving in wrong directions. The proposed method is able to detect above anomalies at higher accuracy as compared to existing anomaly detection methods.
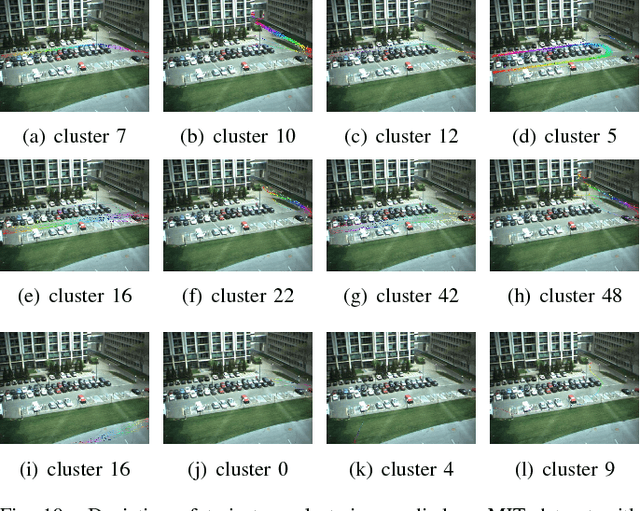
Temporal Unknown Incremental Clustering (TUIC) Model for Analysis of Traffic Surveillance Videos
Apr 18, 2018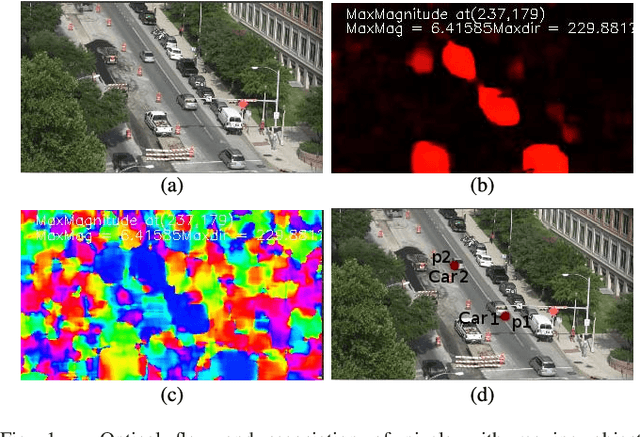

Optimized scene representation is an important characteristic of a framework for detecting abnormalities on live videos. One of the challenges for detecting abnormalities in live videos is real-time detection of objects in a non-parametric way. Another challenge is to efficiently represent the state of objects temporally across frames. In this paper, a Gibbs sampling based heuristic model referred to as Temporal Unknown Incremental Clustering (TUIC) has been proposed to cluster pixels with motion. Pixel motion is first detected using optical flow and a Bayesian algorithm has been applied to associate pixels belonging to similar cluster in subsequent frames. The algorithm is fast and produces accurate results in $\Theta(kn)$ time, where $k$ is the number of clusters and $n$ the number of pixels. Our experimental validation with publicly available datasets reveals that the proposed framework has good potential to open-up new opportunities for real-time traffic analysis.
Dynamic Trajectory Model for Analysis of Traffic States using DPMM
Mar 18, 2018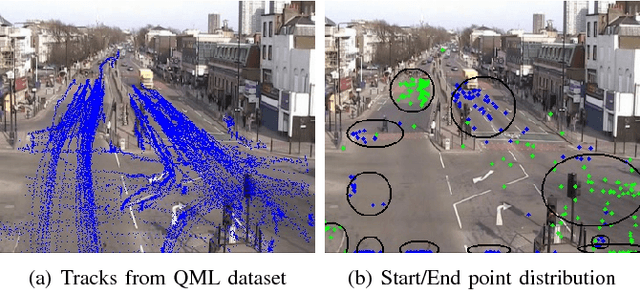


Appropriate modeling of a surveillance scene is essential while analyzing and detecting anomalies in road traffic. Learning usual paths can provide much insight into road traffic situation and to identify abnormal routes taken by commuters/vehicles in a traffic scene. If usual traffic paths are learned in a nonparametric way, manual effort of marking the roads can be avoided. We propose an unsupervised and nonparametric method to learn frequently used paths from the tracks of moving objects in $\Theta(kn)$ time, where $k$ is the number of paths and $n$ represents the number of tracks. In the proposed method, temporal correlation of the moving objects is taken into consideration to make the clustering meaningful using Temporally Incremental Gravity Model-Dynamic Trajectory Model (TIGM-DTM). In addition, the scene learning is based on distance, thus making it realistically intuitive in estimating the model parameters. Experimental validation reveals that the proposed method can learn a scene quickly without knowing the number of paths ($k$). We have compared the results with mean shift and DBSCAN. Further, we extend the model to represent states of a scene that can be used for taking timely actions. We have applied the model to understand its effectiveness in other domain.
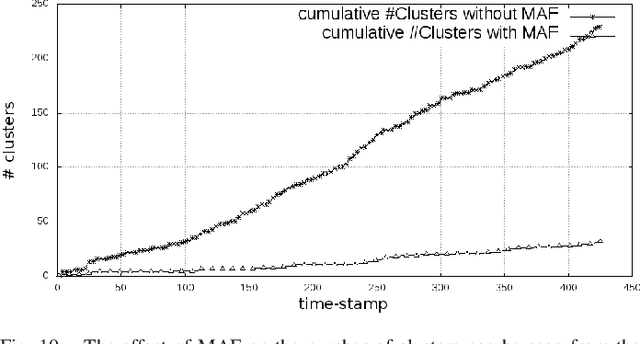
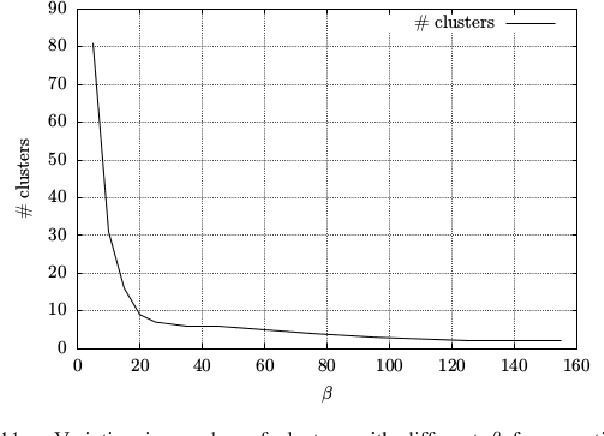
Queuing Theory Guided Intelligent Traffic Scheduling through Video Analysis using Dirichlet Process Mixture Model
Mar 17, 2018
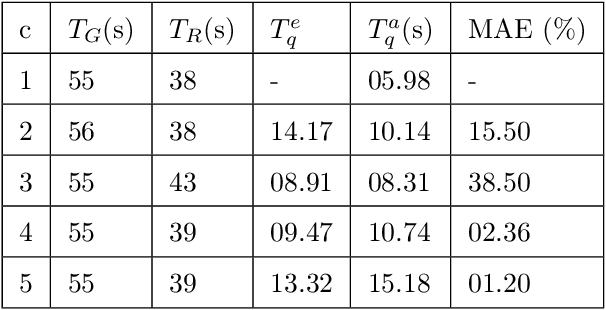

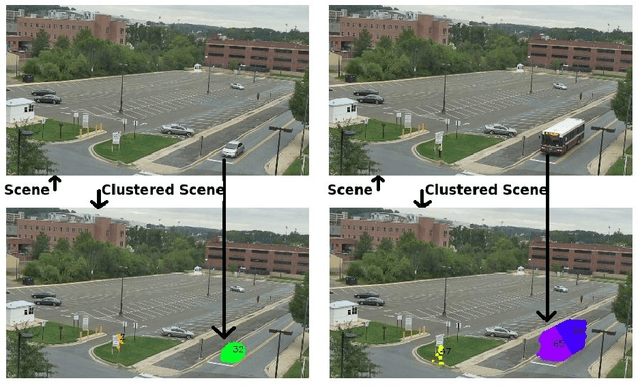
Accurate prediction of traffic signal duration for roadway junction is a challenging problem due to the dynamic nature of traffic flows. Though supervised learning can be used, parameters may vary across roadway junctions. In this paper, we present a computer vision guided expert system that can learn the departure rate of a given traffic junction modeled using traditional queuing theory. First, we temporally group the optical flow of the moving vehicles using Dirichlet Process Mixture Model (DPMM). These groups are referred to as tracklets or temporal clusters. Tracklet features are then used to learn the dynamic behavior of a traffic junction, especially during on/off cycles of a signal. The proposed queuing theory based approach can predict the signal open duration for the next cycle with higher accuracy when compared with other popular features used for tracking. The hypothesis has been verified on two publicly available video datasets. The results reveal that the DPMM based features are better than existing tracking frameworks to estimate $\mu$. Thus, signal duration prediction is more accurate when tested on these datasets.The method can be used for designing intelligent operator-independent traffic control systems for roadway junctions at cities and highways.