 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhere to relocate?: Object rearrangement inside cluttered and confined environments for robotic manipulation
Mar 24, 2020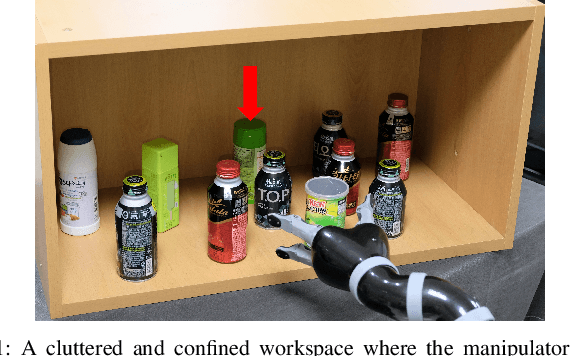
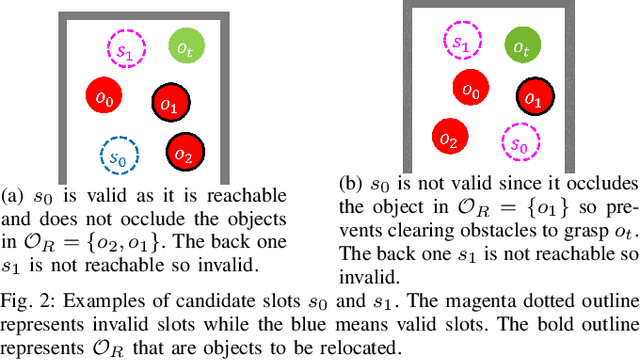
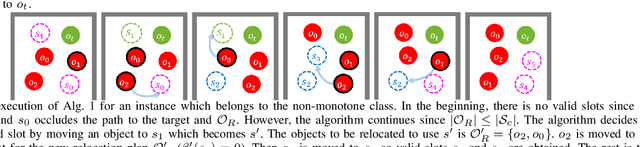
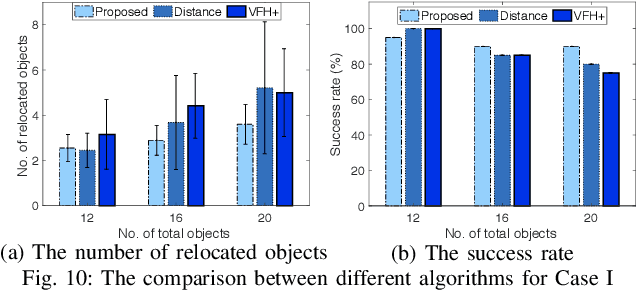
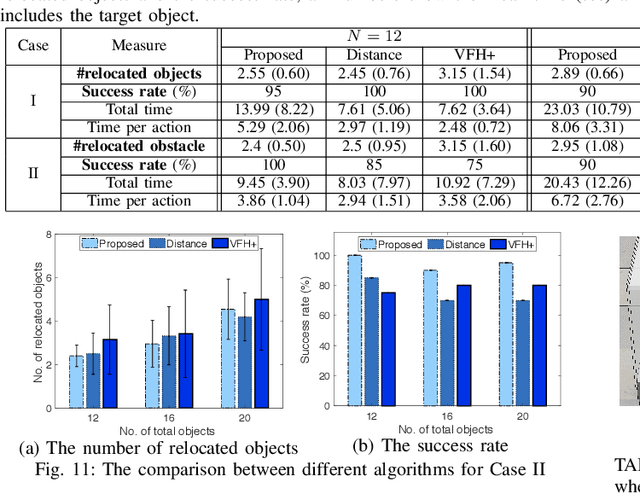
We present an algorithm determining where to relocate objects inside a cluttered and confined space while rearranging objects to retrieve a target object. Although methods that decide what to remove have been proposed, planning for the placement of removed objects inside a workspace has not received much attention. Rather, removed objects are often placed outside the workspace, which incurs additional laborious work (e.g., motion planning and execution of the manipulator and the mobile base, perception of other areas). Some other methods manipulate objects only inside the workspace but without a principle so the rearrangement becomes inefficient. In this work, we consider both monotone (each object is moved only once) and non-monotone arrangement problems which have shown to be NP-hard. Once the sequence of objects to be relocated is given by any existing algorithm, our method aims to minimize the number of pick-and-place actions to place the objects until the target becomes accessible. From extensive experiments, we show that our method reduces the number of pick-and-place actions and the total execution time (the reduction is up to 23.1% and 28.1% respectively) compared to baseline methods while achieving higher success rates.
Fast and resilient manipulation planning for target retrieval in clutter
Mar 24, 2020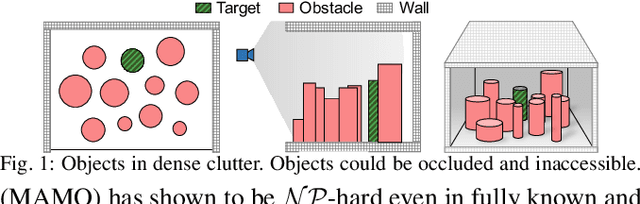
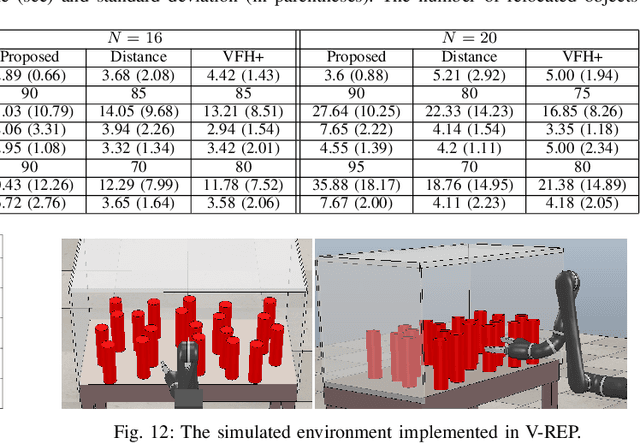
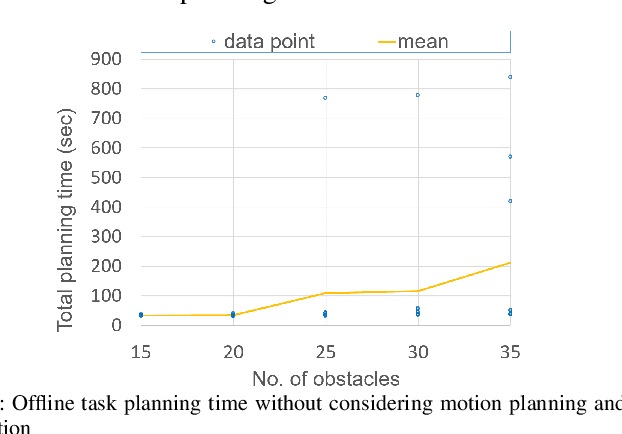
This paper presents a task and motion planning (TAMP) framework for a robotic manipulator in order to retrieve a target object from clutter. We consider a configuration of objects in a confined space with a high density so no collision-free path to the target exists. The robot must relocate some objects to retrieve the target without collisions. For fast completion of object rearrangement, the robot aims to optimize the number of pick-and-place actions which often determines the efficiency of a TAMP framework. We propose a task planner incorporating motion planning to generate executable plans which aims to minimize the number of pick-and-place actions. In addition to fully known and static environments, our method can deal with uncertain and dynamic situations incurred by occluded views. Our method is shown to reduce the number of pick-and-place actions compared to baseline methods (e.g., at least 28.0% of reduction in a known static environment with 20 objects).