 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast and resilient manipulation planning for target retrieval in clutter
Paper and Code
Mar 24, 2020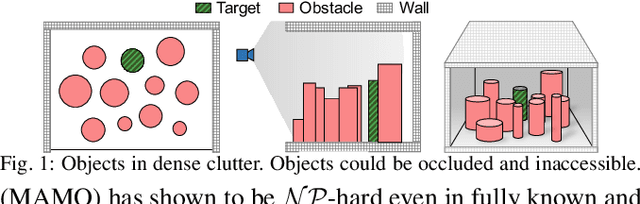
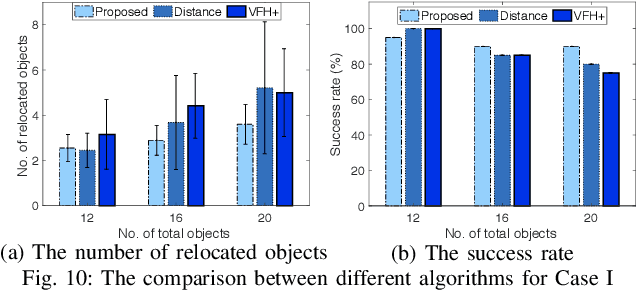
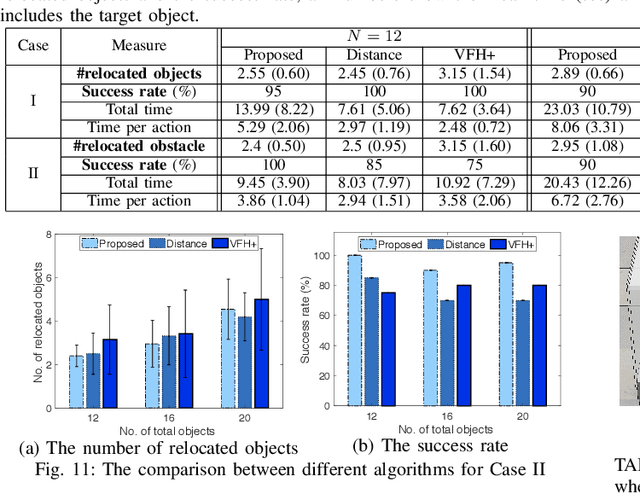
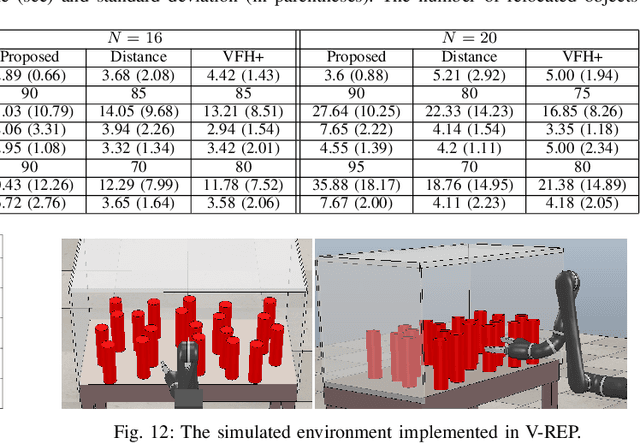
This paper presents a task and motion planning (TAMP) framework for a robotic manipulator in order to retrieve a target object from clutter. We consider a configuration of objects in a confined space with a high density so no collision-free path to the target exists. The robot must relocate some objects to retrieve the target without collisions. For fast completion of object rearrangement, the robot aims to optimize the number of pick-and-place actions which often determines the efficiency of a TAMP framework. We propose a task planner incorporating motion planning to generate executable plans which aims to minimize the number of pick-and-place actions. In addition to fully known and static environments, our method can deal with uncertain and dynamic situations incurred by occluded views. Our method is shown to reduce the number of pick-and-place actions compared to baseline methods (e.g., at least 28.0% of reduction in a known static environment with 20 objects).