 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Global Geo-alignment for Precision Learned Autonomous Vehicle Localization using Aerial Data
Mar 18, 2025

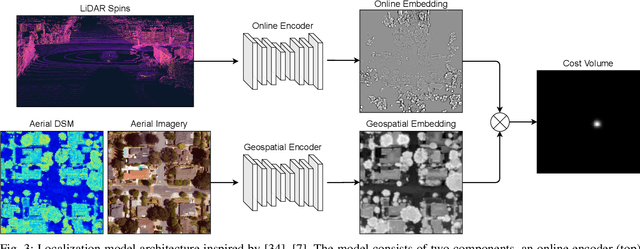

Recently there has been growing interest in the use of aerial and satellite map data for autonomous vehicles, primarily due to its potential for significant cost reduction and enhanced scalability. Despite the advantages, aerial data also comes with challenges such as a sensor-modality gap and a viewpoint difference gap. Learned localization methods have shown promise for overcoming these challenges to provide precise metric localization for autonomous vehicles. Most learned localization methods rely on coarsely aligned ground truth, or implicit consistency-based methods to learn the localization task -- however, in this paper we find that improving the alignment between aerial data and autonomous vehicle sensor data at training time is critical to the performance of a learning-based localization system. We compare two data alignment methods using a factor graph framework and, using these methods, we then evaluate the effects of closely aligned ground truth on learned localization accuracy through ablation studies. Finally, we evaluate a learned localization system using the data alignment methods on a comprehensive (1600km) autonomous vehicle dataset and demonstrate localization error below 0.3m and 0.5$^{\circ}$ sufficient for autonomous vehicle applications.
Exploring Real World Map Change Generalization of Prior-Informed HD Map Prediction Models
Jun 04, 2024



Building and maintaining High-Definition (HD) maps represents a large barrier to autonomous vehicle deployment. This, along with advances in modern online map detection models, has sparked renewed interest in the online mapping problem. However, effectively predicting online maps at a high enough quality to enable safe, driverless deployments remains a significant challenge. Recent work on these models proposes training robust online mapping systems using low quality map priors with synthetic perturbations in an attempt to simulate out-of-date HD map priors. In this paper, we investigate how models trained on these synthetically perturbed map priors generalize to performance on deployment-scale, real world map changes. We present a large-scale experimental study to determine which synthetic perturbations are most useful in generalizing to real world HD map changes, evaluated using multiple years of real-world autonomous driving data. We show there is still a substantial sim2real gap between synthetic prior perturbations and observed real-world changes, which limits the utility of current prior-informed HD map prediction models.