 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Model Based Reinforcement Learning Using $\mathcal{L}_1$ Adaptive Control
Mar 21, 2024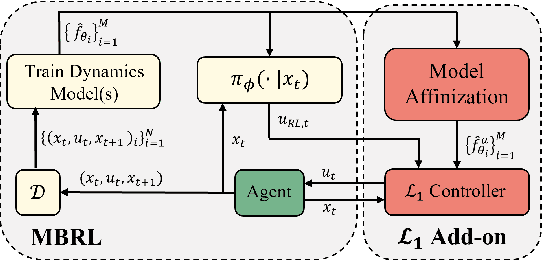
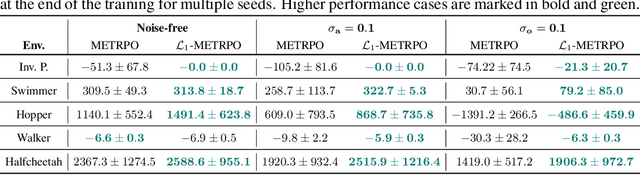
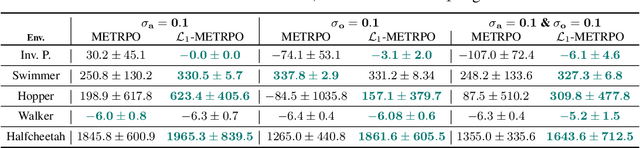
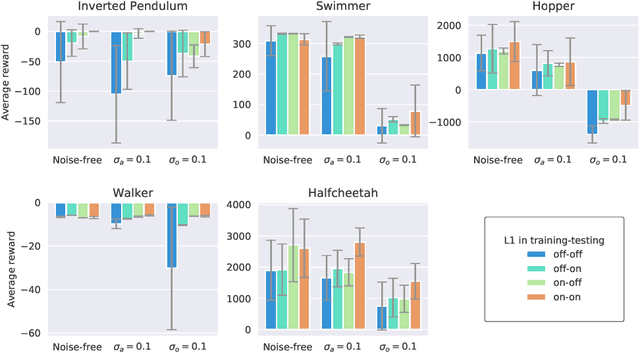
We introduce $\mathcal{L}_1$-MBRL, a control-theoretic augmentation scheme for Model-Based Reinforcement Learning (MBRL) algorithms. Unlike model-free approaches, MBRL algorithms learn a model of the transition function using data and use it to design a control input. Our approach generates a series of approximate control-affine models of the learned transition function according to the proposed switching law. Using the approximate model, control input produced by the underlying MBRL is perturbed by the $\mathcal{L}_1$ adaptive control, which is designed to enhance the robustness of the system against uncertainties. Importantly, this approach is agnostic to the choice of MBRL algorithm, enabling the use of the scheme with various MBRL algorithms. MBRL algorithms with $\mathcal{L}_1$ augmentation exhibit enhanced performance and sample efficiency across multiple MuJoCo environments, outperforming the original MBRL algorithms, both with and without system noise.
Closed-Loop Benchmarking of Stereo Visual-Inertial SLAM Systems: Understanding the Impact of Drift and Latency on Tracking Accuracy
Mar 07, 2020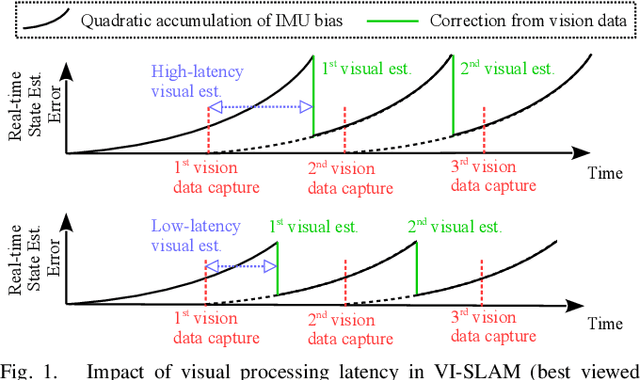
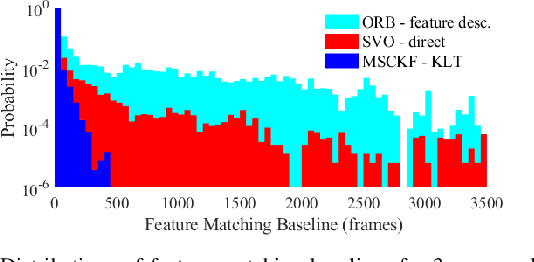
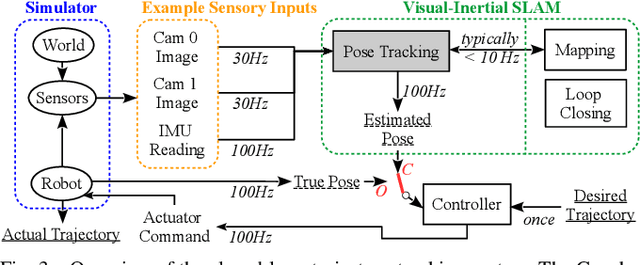
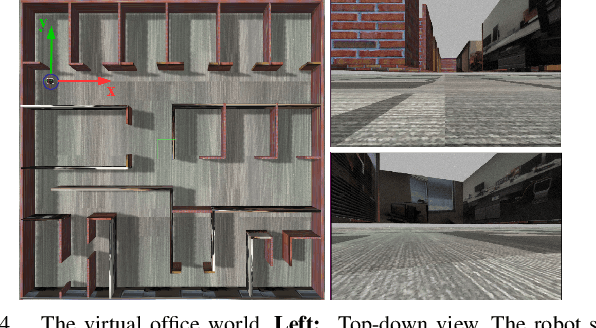
Visual-inertial SLAM is essential for robot navigation in GPS-denied environments, e.g. indoor, underground. Conventionally, the performance of visual-inertial SLAM is evaluated with open-loop analysis, with a focus on the drift level of SLAM systems. In this paper, we raise the question on the importance of visual estimation latency in closed-loop navigation tasks, such as accurate trajectory tracking. To understand the impact of both drift and latency on visual-inertial SLAM systems, a closed-loop benchmarking simulation is conducted, where a robot is commanded to follow a desired trajectory using the feedback from visual-inertial estimation. By extensively evaluating the trajectory tracking performance of representative state-of-the-art visual-inertial SLAM systems, we reveal the importance of latency reduction in visual estimation module of these systems. The findings suggest directions of future improvements for visual-inertial SLAM.