 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Crime Scene Investigations through Virtual Reality and Deep Learning Techniques
Sep 27, 2024The analysis of a crime scene is a pivotal activity in forensic investigations. Crime Scene Investigators and forensic science practitioners rely on best practices, standard operating procedures, and critical thinking, to produce rigorous scientific reports to document the scenes of interest and meet the quality standards expected in the courts. However, crime scene examination is a complex and multifaceted task often performed in environments susceptible to deterioration, contamination, and alteration, despite the use of contact-free and non-destructive methods of analysis. In this context, the documentation of the sites, and the identification and isolation of traces of evidential value remain challenging endeavours. In this paper, we propose a photogrammetric reconstruction of the crime scene for inspection in virtual reality (VR) and focus on fully automatic object recognition with deep learning (DL) algorithms through a client-server architecture. A pre-trained Faster-RCNN model was chosen as the best method that can best categorize relevant objects at the scene, selected by experts in the VR environment. These operations can considerably improve and accelerate crime scene analysis and help the forensic expert in extracting measurements and analysing in detail the objects under analysis. Experimental results on a simulated crime scene have shown that the proposed method can be effective in finding and recognizing objects with potential evidentiary value, enabling timely analyses of crime scenes, particularly those with health and safety risks (e.g. fires, explosions, chemicals, etc.), while minimizing subjective bias and contamination of the scene.
The MECCANO Dataset: Understanding Human-Object Interactions from Egocentric Videos in an Industrial-like Domain
Oct 12, 2020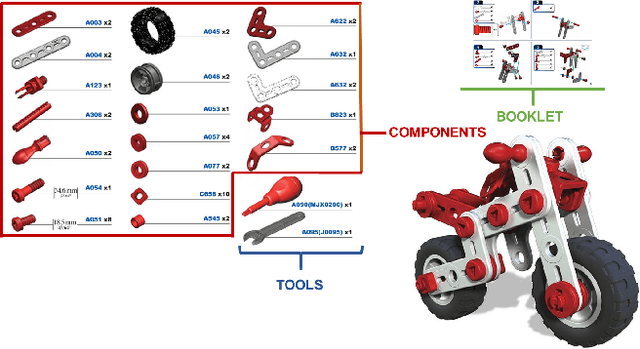
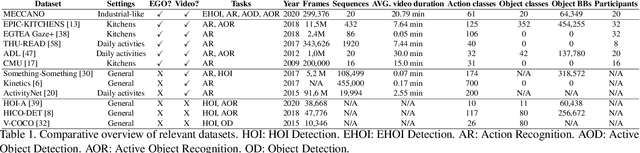

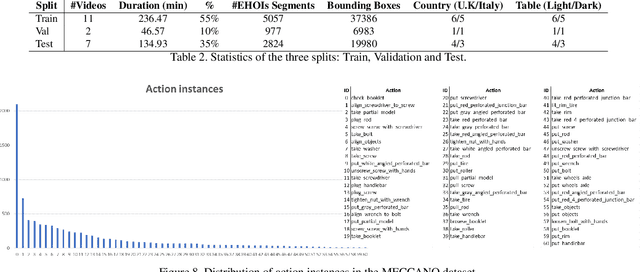
Wearable cameras allow to collect images and videos of humans interacting with the world. While human-object interactions have been thoroughly investigated in third person vision, the problem has been understudied in egocentric settings and in industrial scenarios. To fill this gap, we introduce MECCANO, the first dataset of egocentric videos to study human-object interactions in industrial-like settings. MECCANO has been acquired by 20 participants who were asked to build a motorbike model, for which they had to interact with tiny objects and tools. The dataset has been explicitly labeled for the task of recognizing human-object interactions from an egocentric perspective. Specifically, each interaction has been labeled both temporally (with action segments) and spatially (with active object bounding boxes). With the proposed dataset, we investigate four different tasks including 1) action recognition, 2) active object detection, 3) active object recognition and 4) egocentric human-object interaction detection, which is a revisited version of the standard human-object interaction detection task. Baseline results show that the MECCANO dataset is a challenging benchmark to study egocentric human-object interactions in industrial-like scenarios. We publicy release the dataset at https://iplab.dmi.unict.it/MECCANO.