Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplainability of Intelligent Transportation Systems using Knowledge Compilation: a Traffic Light Controller Case
Jul 09, 2020
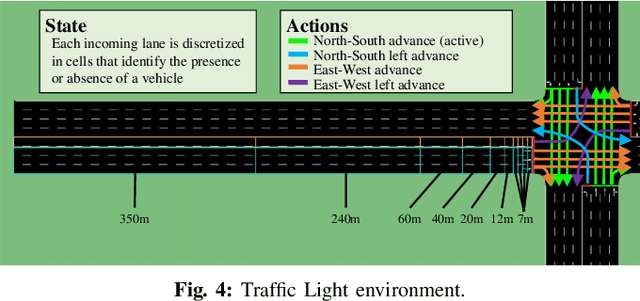
Usage of automated controllers which make decisions on an environment are widespread and are often based on black-box models. We use Knowledge Compilation theory to bring explainability to the controller's decision given the state of the system. For this, we use simulated historical state-action data as input and build a compact and structured representation which relates states with actions. We implement this method in a Traffic Light Control scenario where the controller selects the light cycle by observing the presence (or absence) of vehicles in different regions of the incoming roads.
* Proc. IEEE Int. Conf. on Intelligent Transportation Systems, Rhodes,
Greece, 2020. (In Press)
Via