 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDawnIK: Decentralized Collision-Aware Inverse Kinematics Solver for Heterogeneous Multi-Arm Systems
Jul 24, 2023Although inverse kinematics of serial manipulators is a well studied problem, challenges still exist in finding smooth feasible solutions that are also collision aware. Furthermore, with collaborative and service robots gaining traction, different robotic systems have to work in close proximity. This means that the current inverse kinematics approaches have to not only avoid collisions with themselves but also collisions with other robot arms. Therefore, we present a novel approach to compute inverse kinematics for serial manipulators that take into account different constraints while trying to reach a desired end-effector position and/or orientation that avoids collisions with themselves and other arms. Unlike other constraint based approaches, we neither perform expensive inverse Jacobian computations nor do we require arms with redundant degrees of freedom. Instead, we formulate different constraints as weighted cost functions to be optimized by a non-linear optimization solver. Our approach is superior to the state-of-the-art CollisionIK in terms of collision avoidance in the presence of multiple arms in confined spaces with no detected collisions at all in all the experimental scenarios. When the probability of collision is low, our approach shows better performance at trajectory tracking as well. Additionally, our approach is capable of simultaneous yet decentralized control of multiple arms for trajectory tracking in intersecting workspace without any collisions.
Fruit Mapping with Shape Completion for Autonomous Crop Monitoring
Mar 29, 2022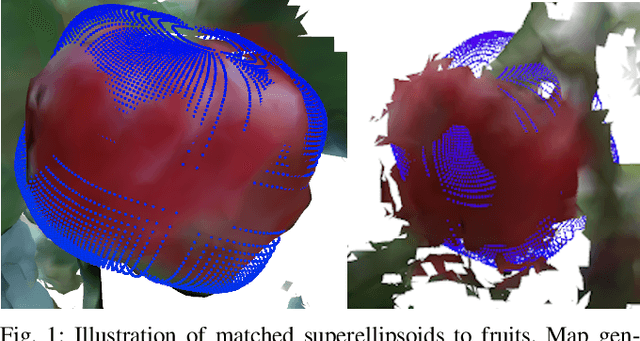
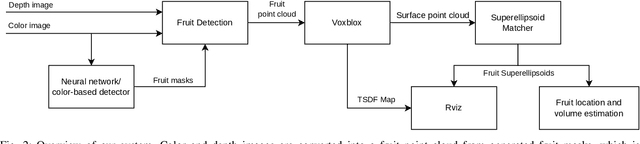
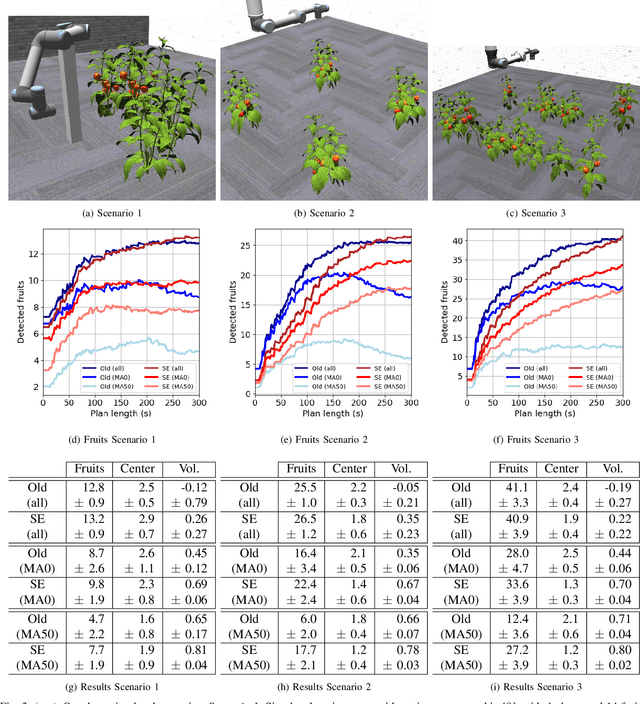

Autonomous crop monitoring is a difficult task due to the complex structure of plants. Occlusions from leaves can make it impossible to obtain complete views about all fruits of, e.g., pepper plants. Therefore, accurately estimating the shape and volume of fruits from partial information is crucial to enable further advanced automation tasks such as yield estimation and automated fruit picking. In this paper, we present an approach for mapping fruits on plants and estimating their shape by matching superellipsoids. Our system segments fruits in images and uses their masks to generate point clouds of the fruits. To combine sequences of acquired point clouds, we utilize a real-time 3D mapping framework and build up a fruit map based on truncated signed distance fields. We cluster fruits from this map and use optimized superellipsoids for matching to obtain accurate shape estimates. In our experiments, we show in various simulated scenarios with a robotic arm equipped with an RGB-D camera that our approach can accurately estimate fruit volumes. Additionally, we provide qualitative results of estimated fruit shapes from data recorded in a commercial glasshouse environment.