 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDepth Completion with Twin Surface Extrapolation at Occlusion Boundaries
Apr 07, 2021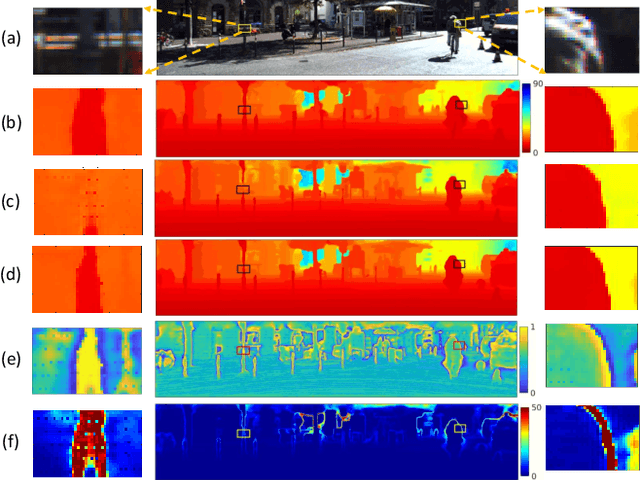



Depth completion starts from a sparse set of known depth values and estimates the unknown depths for the remaining image pixels. Most methods model this as depth interpolation and erroneously interpolate depth pixels into the empty space between spatially distinct objects, resulting in depth-smearing across occlusion boundaries. Here we propose a multi-hypothesis depth representation that explicitly models both foreground and background depths in the difficult occlusion-boundary regions. Our method can be thought of as performing twin-surface extrapolation, rather than interpolation, in these regions. Next our method fuses these extrapolated surfaces into a single depth image leveraging the image data. Key to our method is the use of an asymmetric loss function that operates on a novel twin-surface representation. This enables us to train a network to simultaneously do surface extrapolation and surface fusion. We characterize our loss function and compare with other common losses. Finally, we validate our method on three different datasets; KITTI, an outdoor real-world dataset, NYU2, indoor real-world depth dataset and Virtual KITTI, a photo-realistic synthetic dataset with dense groundtruth, and demonstrate improvement over the state of the art.
Depth Coefficients for Depth Completion
Mar 13, 2019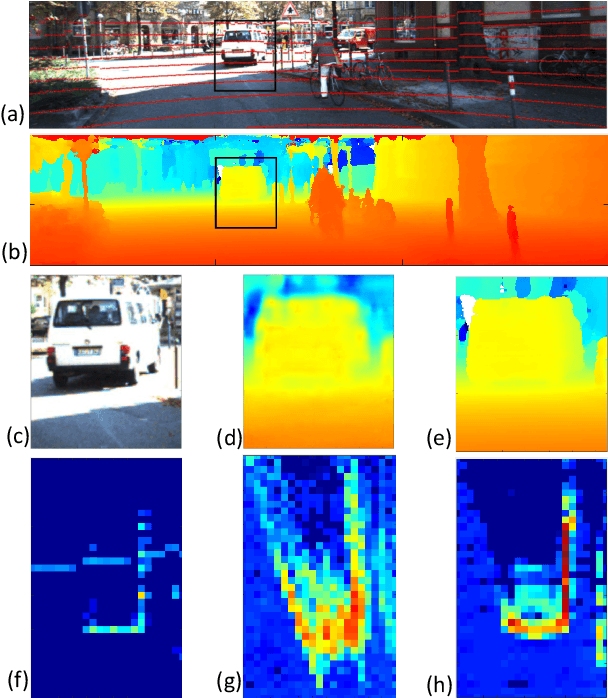

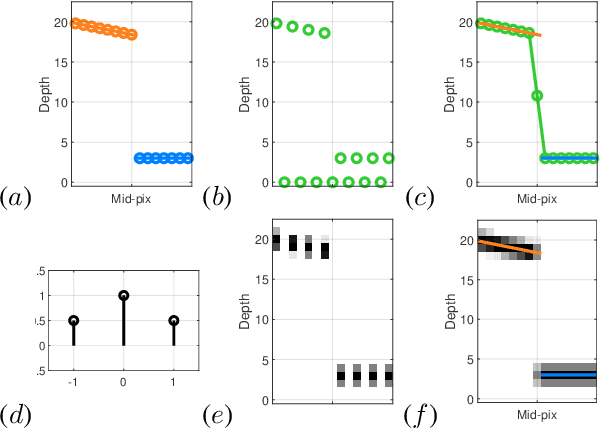
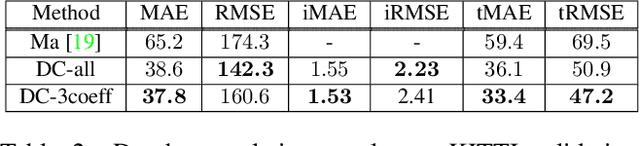
Depth completion involves estimating a dense depth image from sparse depth measurements, often guided by a color image. While linear upsampling is straight forward, it results in artifacts including depth pixels being interpolated in empty space across discontinuities between objects. Current methods use deep networks to upsample and "complete" the missing depth pixels. Nevertheless, depth smearing between objects remains a challenge. We propose a new representation for depth called Depth Coefficients (DC) to address this problem. It enables convolutions to more easily avoid inter-object depth mixing. We also show that the standard Mean Squared Error (MSE) loss function can promote depth mixing, and thus propose instead to use cross-entropy loss for DC. With quantitative and qualitative evaluation on benchmarks, we show that switching out sparse depth input and MSE loss with our DC representation and cross-entropy loss is a simple way to improve depth completion performance, and reduce pixel depth mixing, which leads to improved depth-based object detection.