 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring the impact of traffic signal control and connected and automated vehicles on intersections safety: A deep reinforcement learning approach
May 29, 2024



In transportation networks, intersections pose significant risks of collisions due to conflicting movements of vehicles approaching from different directions. To address this issue, various tools can exert influence on traffic safety both directly and indirectly. This study focuses on investigating the impact of adaptive signal control and connected and automated vehicles (CAVs) on intersection safety using a deep reinforcement learning approach. The objective is to assess the individual and combined effects of CAVs and adaptive traffic signal control on traffic safety, considering rear-end and crossing conflicts. The study employs a Deep Q Network (DQN) to regulate traffic signals and driving behaviors of both CAVs and Human Drive Vehicles (HDVs), and uses Time To Collision (TTC) metric to evaluate safety. The findings demonstrate a significant reduction in rear-end and crossing conflicts through the combined implementation of CAVs and DQNs-based traffic signal control. Additionally, the long-term positive effects of CAVs on safety are similar to the short-term effects of combined CAVs and DQNs-based traffic signal control. Overall, the study emphasizes the potential benefits of integrating CAVs and adaptive traffic signal control approaches in order to enhance traffic safety. The findings of this study could provide valuable insights for city officials and transportation authorities in developing effective strategies to improve safety at signalized intersections.
Deep Learning-Driven Edge Video Analytics: A Survey
Nov 28, 2022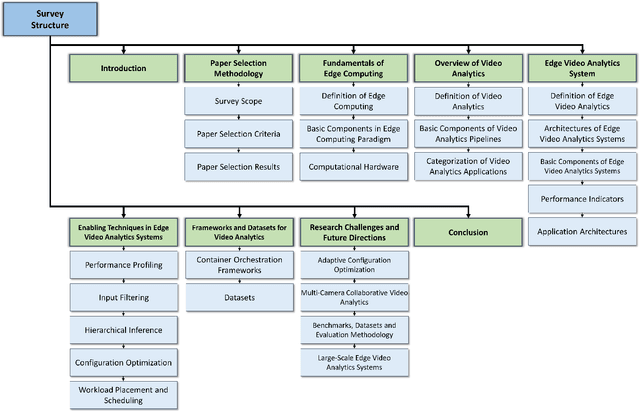



Video, as a key driver in the global explosion of digital information, can create tremendous benefits for human society. Governments and enterprises are deploying innumerable cameras for a variety of applications, e.g., law enforcement, emergency management, traffic control, and security surveillance, all facilitated by video analytics (VA). This trend is spurred by the rapid advancement of deep learning (DL), which enables more precise models for object classification, detection, and tracking. Meanwhile, with the proliferation of Internet-connected devices, massive amounts of data are generated daily, overwhelming the cloud. Edge computing, an emerging paradigm that moves workloads and services from the network core to the network edge, has been widely recognized as a promising solution. The resulting new intersection, edge video analytics (EVA), begins to attract widespread attention. Nevertheless, only a few loosely-related surveys exist on this topic. A dedicated venue for collecting and summarizing the latest advances of EVA is highly desired by the community. Besides, the basic concepts of EVA (e.g., definition, architectures, etc.) are ambiguous and neglected by these surveys due to the rapid development of this domain. A thorough clarification is needed to facilitate a consensus on these concepts. To fill in these gaps, we conduct a comprehensive survey of the recent efforts on EVA. In this paper, we first review the fundamentals of edge computing, followed by an overview of VA. The EVA system and its enabling techniques are discussed next. In addition, we introduce prevalent frameworks and datasets to aid future researchers in the development of EVA systems. Finally, we discuss existing challenges and foresee future research directions. We believe this survey will help readers comprehend the relationship between VA and edge computing, and spark new ideas on EVA.
An Open-Source Framework for Adaptive Traffic Signal Control
Sep 01, 2019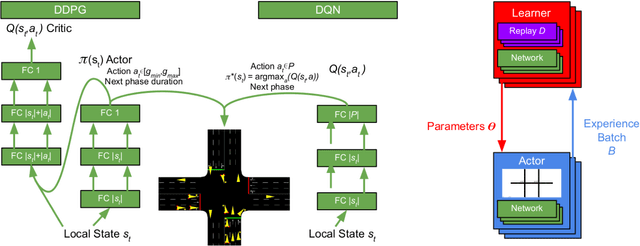
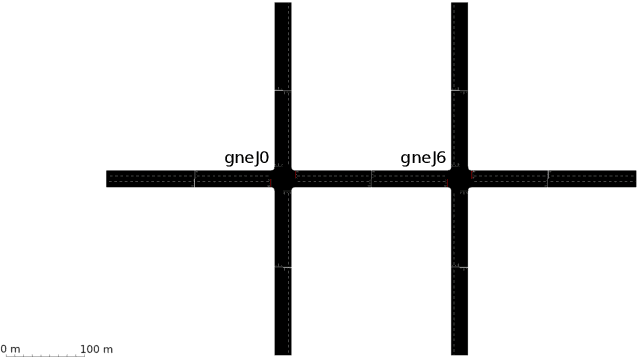
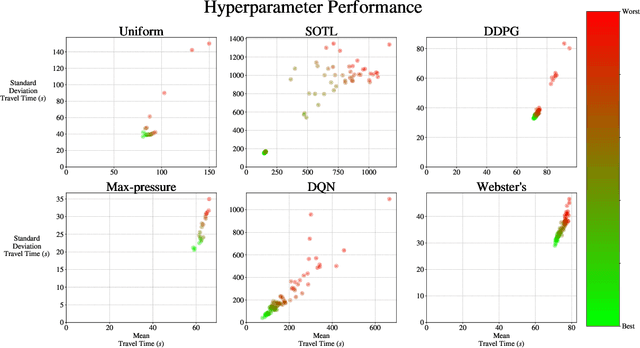

Sub-optimal control policies in transportation systems negatively impact mobility, the environment and human health. Developing optimal transportation control systems at the appropriate scale can be difficult as cities' transportation systems can be large, complex and stochastic. Intersection traffic signal controllers are an important element of modern transportation infrastructure where sub-optimal control policies can incur high costs to many users. Many adaptive traffic signal controllers have been proposed by the community but research is lacking regarding their relative performance difference - which adaptive traffic signal controller is best remains an open question. This research contributes a framework for developing and evaluating different adaptive traffic signal controller models in simulation - both learning and non-learning - and demonstrates its capabilities. The framework is used to first, investigate the performance variance of the modelled adaptive traffic signal controllers with respect to their hyperparameters and second, analyze the performance differences between controllers with optimal hyperparameters. The proposed framework contains implementations of some of the most popular adaptive traffic signal controllers from the literature; Webster's, Max-pressure and Self-Organizing Traffic Lights, along with deep Q-network and deep deterministic policy gradient reinforcement learning controllers. This framework will aid researchers by accelerating their work from a common starting point, allowing them to generate results faster with less effort. All framework source code is available at https://github.com/docwza/sumolights.
Using a Deep Reinforcement Learning Agent for Traffic Signal Control
Nov 03, 2016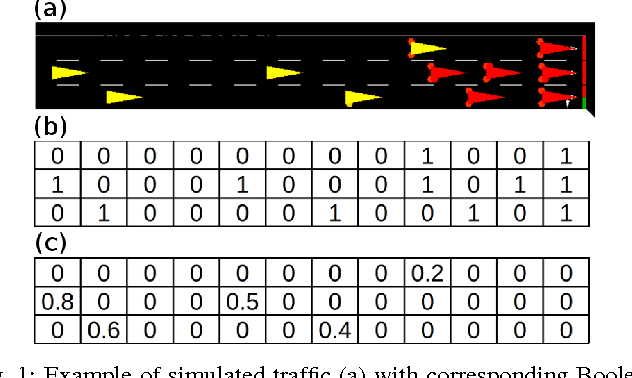
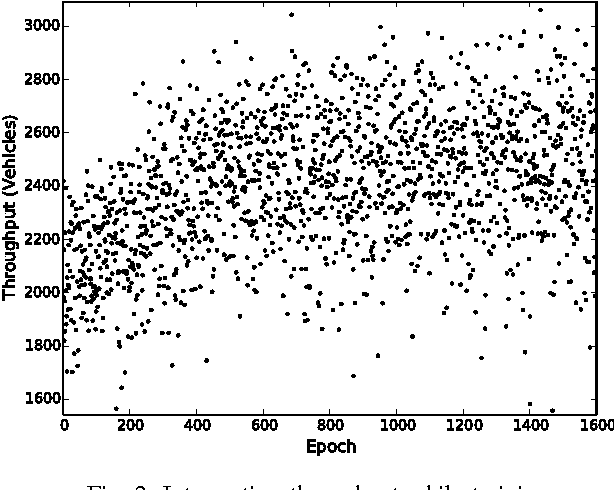
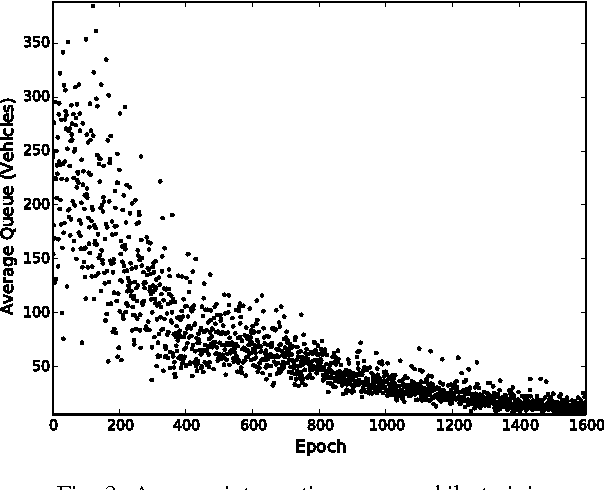
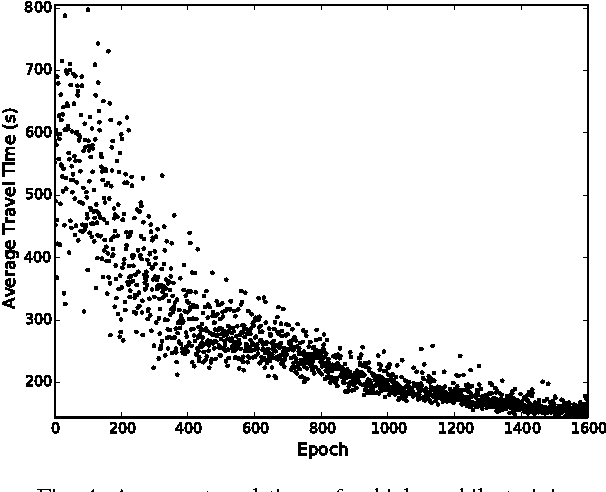
Ensuring transportation systems are efficient is a priority for modern society. Technological advances have made it possible for transportation systems to collect large volumes of varied data on an unprecedented scale. We propose a traffic signal control system which takes advantage of this new, high quality data, with minimal abstraction compared to other proposed systems. We apply modern deep reinforcement learning methods to build a truly adaptive traffic signal control agent in the traffic microsimulator SUMO. We propose a new state space, the discrete traffic state encoding, which is information dense. The discrete traffic state encoding is used as input to a deep convolutional neural network, trained using Q-learning with experience replay. Our agent was compared against a one hidden layer neural network traffic signal control agent and reduces average cumulative delay by 82%, average queue length by 66% and average travel time by 20%.