 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Open-Source Framework for Adaptive Traffic Signal Control
Sep 01, 2019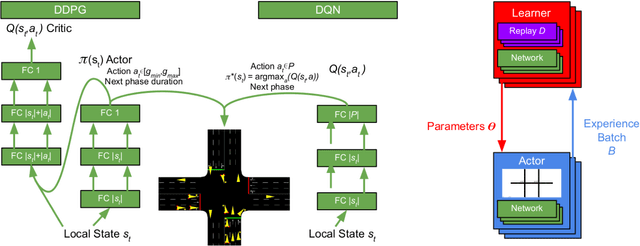
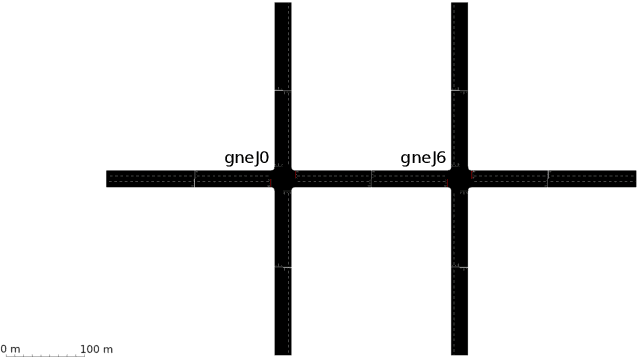
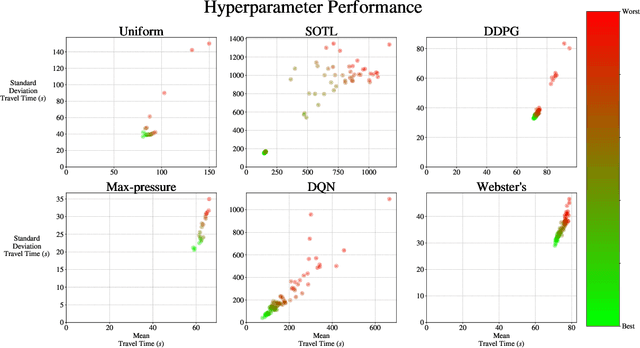

Sub-optimal control policies in transportation systems negatively impact mobility, the environment and human health. Developing optimal transportation control systems at the appropriate scale can be difficult as cities' transportation systems can be large, complex and stochastic. Intersection traffic signal controllers are an important element of modern transportation infrastructure where sub-optimal control policies can incur high costs to many users. Many adaptive traffic signal controllers have been proposed by the community but research is lacking regarding their relative performance difference - which adaptive traffic signal controller is best remains an open question. This research contributes a framework for developing and evaluating different adaptive traffic signal controller models in simulation - both learning and non-learning - and demonstrates its capabilities. The framework is used to first, investigate the performance variance of the modelled adaptive traffic signal controllers with respect to their hyperparameters and second, analyze the performance differences between controllers with optimal hyperparameters. The proposed framework contains implementations of some of the most popular adaptive traffic signal controllers from the literature; Webster's, Max-pressure and Self-Organizing Traffic Lights, along with deep Q-network and deep deterministic policy gradient reinforcement learning controllers. This framework will aid researchers by accelerating their work from a common starting point, allowing them to generate results faster with less effort. All framework source code is available at https://github.com/docwza/sumolights.
Using a Deep Reinforcement Learning Agent for Traffic Signal Control
Nov 03, 2016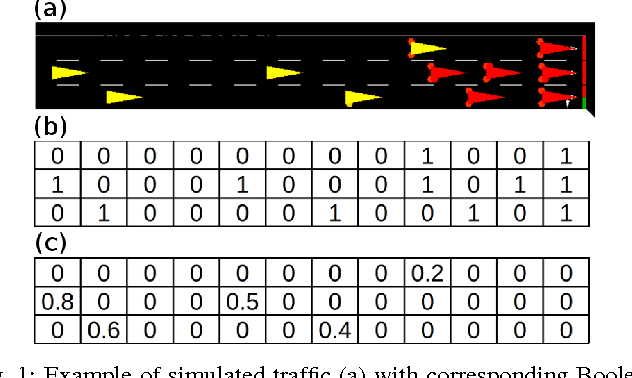
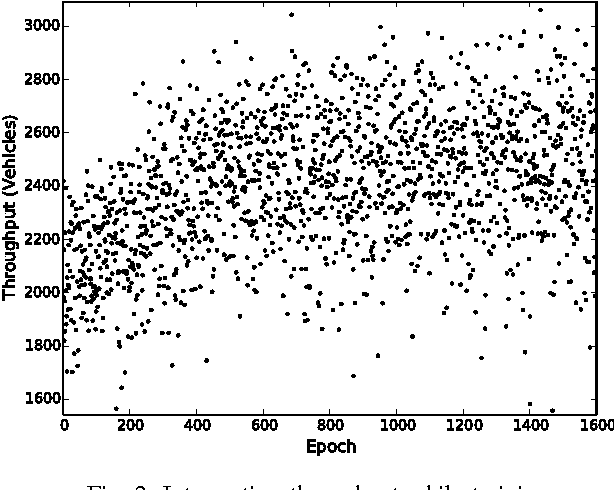
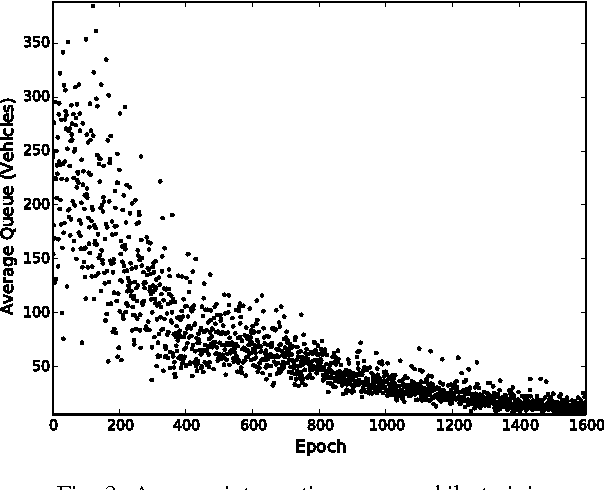
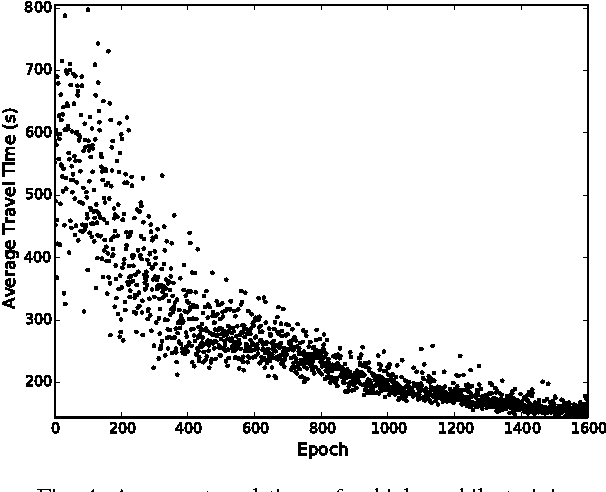
Ensuring transportation systems are efficient is a priority for modern society. Technological advances have made it possible for transportation systems to collect large volumes of varied data on an unprecedented scale. We propose a traffic signal control system which takes advantage of this new, high quality data, with minimal abstraction compared to other proposed systems. We apply modern deep reinforcement learning methods to build a truly adaptive traffic signal control agent in the traffic microsimulator SUMO. We propose a new state space, the discrete traffic state encoding, which is information dense. The discrete traffic state encoding is used as input to a deep convolutional neural network, trained using Q-learning with experience replay. Our agent was compared against a one hidden layer neural network traffic signal control agent and reduces average cumulative delay by 82%, average queue length by 66% and average travel time by 20%.