 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMachine Learning Techniques for Predicting the Short-Term Outcome of Resective Surgery in Lesional-Drug Resistance Epilepsy
Feb 10, 2023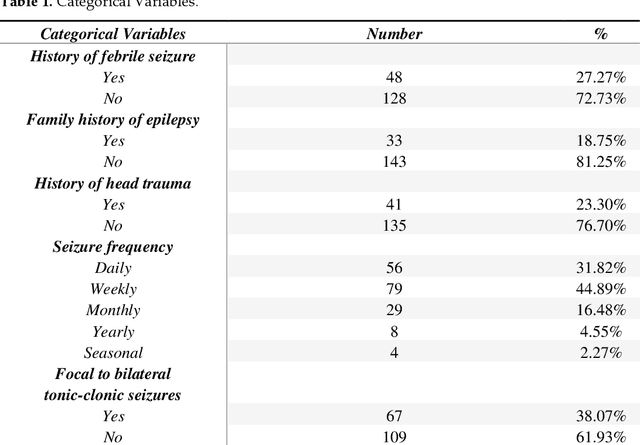
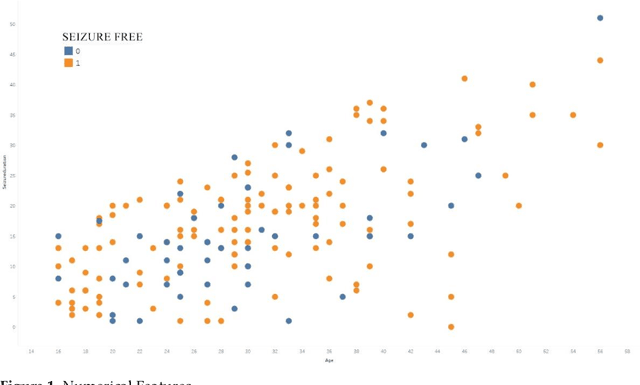
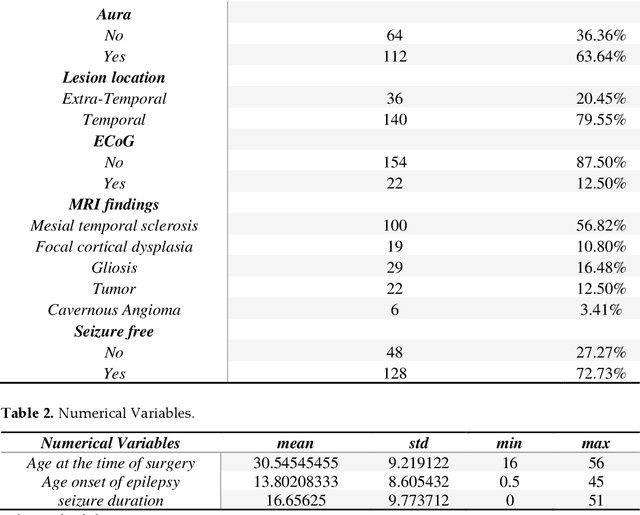
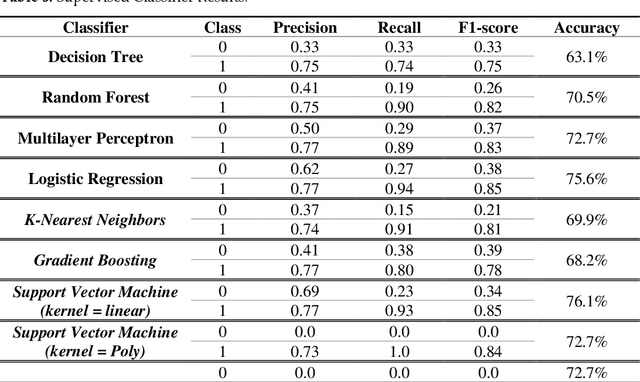
In this study, we developed and tested machine learning models to predict epilepsy surgical outcome using noninvasive clinical and demographic data from patients. Methods: Seven dif-ferent categorization algorithms were used to analyze the data. The techniques are also evaluated using the Leave-One-Out method. For precise evaluation of the results, the parameters accuracy, precision, recall and, F1-score are calculated. Results: Our findings revealed that a machine learning-based presurgical model of patients' clinical features may accurately predict the outcome of epilepsy surgery in patients with drug-resistant lesional epilepsy. The support vector machine (SVM) with the linear kernel yielded 76.1% in terms of accuracy could predict results in 96.7% of temporal lobe epilepsy (TLE) patients and 79.5% of extratemporal lobe epilepsy (ETLE) cases using ten clinical features. Significance: To predict the outcome of epilepsy surgery, this study recommends the use of a machine learning strategy based on supervised classification and se-lection of feature subsets data mining. Progress in the development of machine learning-based prediction models offers optimism for personalised medicine access.
RLAS-BIABC: A Reinforcement Learning-Based Answer Selection Using the BERT Model Boosted by an Improved ABC Algorithm
Jan 07, 2023Answer selection (AS) is a critical subtask of the open-domain question answering (QA) problem. The present paper proposes a method called RLAS-BIABC for AS, which is established on attention mechanism-based long short-term memory (LSTM) and the bidirectional encoder representations from transformers (BERT) word embedding, enriched by an improved artificial bee colony (ABC) algorithm for pretraining and a reinforcement learning-based algorithm for training backpropagation (BP) algorithm. BERT can be comprised in downstream work and fine-tuned as a united task-specific architecture, and the pretrained BERT model can grab different linguistic effects. Existing algorithms typically train the AS model with positive-negative pairs for a two-class classifier. A positive pair contains a question and a genuine answer, while a negative one includes a question and a fake answer. The output should be one for positive and zero for negative pairs. Typically, negative pairs are more than positive, leading to an imbalanced classification that drastically reduces system performance. To deal with it, we define classification as a sequential decision-making process in which the agent takes a sample at each step and classifies it. For each classification operation, the agent receives a reward, in which the prize of the majority class is less than the reward of the minority class. Ultimately, the agent finds the optimal value for the policy weights. We initialize the policy weights with the improved ABC algorithm. The initial value technique can prevent problems such as getting stuck in the local optimum. Although ABC serves well in most tasks, there is still a weakness in the ABC algorithm that disregards the fitness of related pairs of individuals in discovering a neighboring food source position.
* 21 pages
Semi-supervised Vector-Quantization in Visual SLAM using HGCN
Jul 14, 2022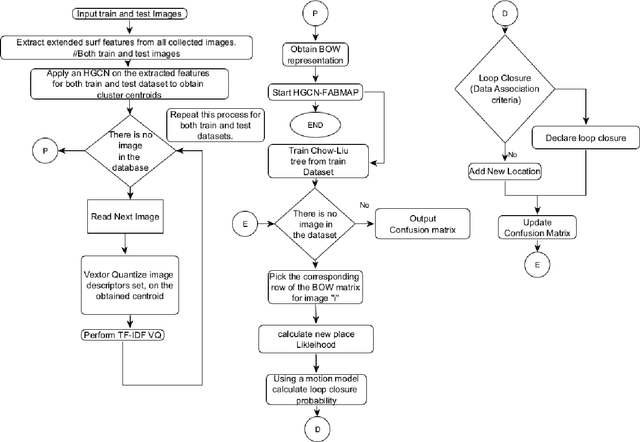
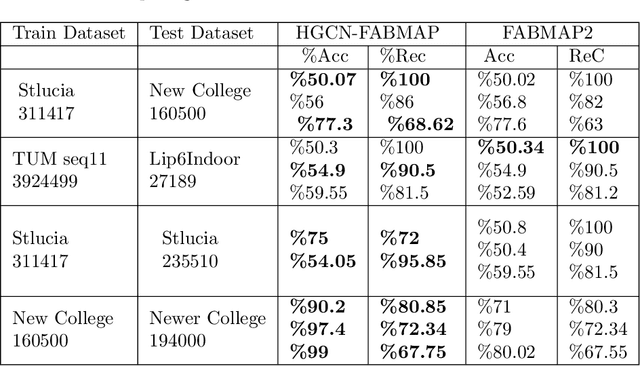

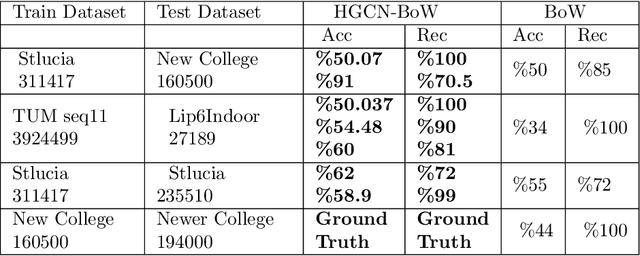
In this paper, two semi-supervised appearance based loop closure detection technique, HGCN-FABMAP and HGCN-BoW are introduced. Furthermore an extension to the current state of the art localization SLAM algorithm, ORB-SLAM, is presented. The proposed HGCN-FABMAP method is implemented in an off-line manner incorporating Bayesian probabilistic schema for loop detection decision making. Specifically, we let a Hyperbolic Graph Convolutional Neural Network (HGCN) to operate over the SURF features graph space, and perform vector quantization part of the SLAM procedure. This part previously was performed in an unsupervised manner using algorithms like HKmeans, kmeans++,..etc. The main Advantage of using HGCN, is that it scales linearly in number of graph edges. Experimental results shows that HGCN-FABMAP algorithm needs far more cluster centroids than HGCN-ORB, otherwise it fails to detect loop closures. Therefore we consider HGCN-ORB to be more efficient in terms of memory consumption, also we conclude the superiority of HGCN-BoW and HGCN-FABMAP with respect to other algorithms.
Self-supervised Vector-Quantization in Visual SLAM using Deep Convolutional Autoencoders
Jul 14, 2022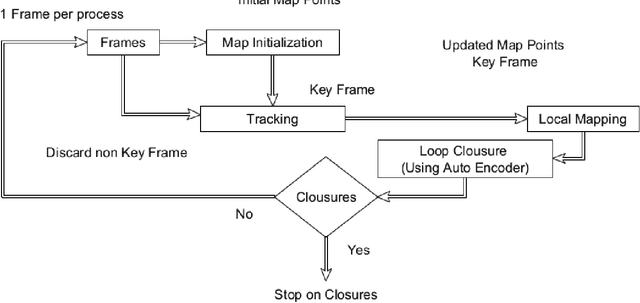
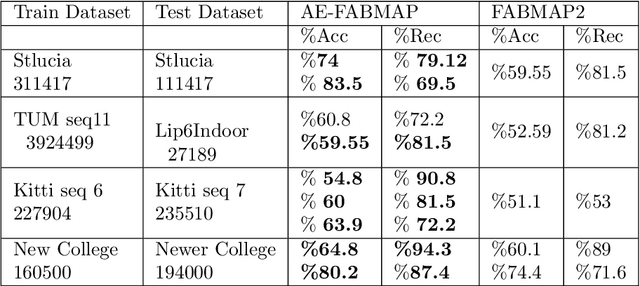
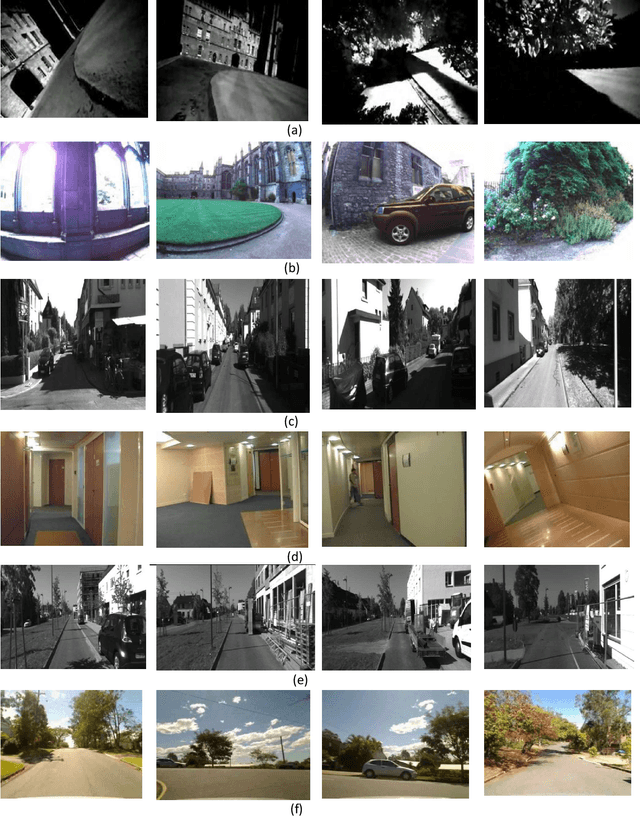
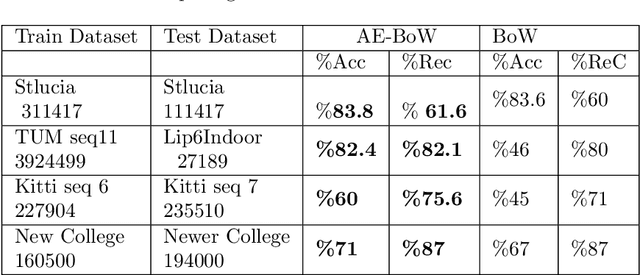
In this paper, we introduce AE-FABMAP, a new self-supervised bag of words-based SLAM method. We also present AE-ORB-SLAM, a modified version of the current state of the art BoW-based path planning algorithm. That is, we have used a deep convolutional autoencoder to find loop closures. In the context of bag of words visual SLAM, vector quantization (VQ) is considered as the most time-consuming part of the SLAM procedure, which is usually performed in the offline phase of the SLAM algorithm using unsupervised algorithms such as Kmeans++. We have addressed the loop closure detection part of the BoW-based SLAM methods in a self-supervised manner, by integrating an autoencoder for doing vector quantization. This approach can increase the accuracy of large-scale SLAM, where plenty of unlabeled data is available. The main advantage of using a self-supervised is that it can help reducing the amount of labeling. Furthermore, experiments show that autoencoders are far more efficient than semi-supervised methods like graph convolutional neural networks, in terms of speed and memory consumption. We integrated this method into the state of the art long range appearance based visual bag of word SLAM, FABMAP2, also in ORB-SLAM. Experiments demonstrate the superiority of this approach in indoor and outdoor datasets over regular FABMAP2 in all cases, and it achieves higher accuracy in loop closure detection and trajectory generation.
Real-Time Activity Recognition and Intention Recognition Using a Vision-based Embedded System
Aug 04, 2021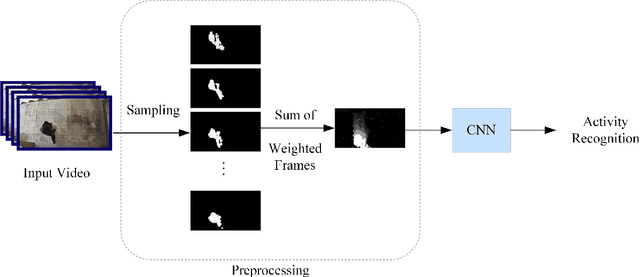
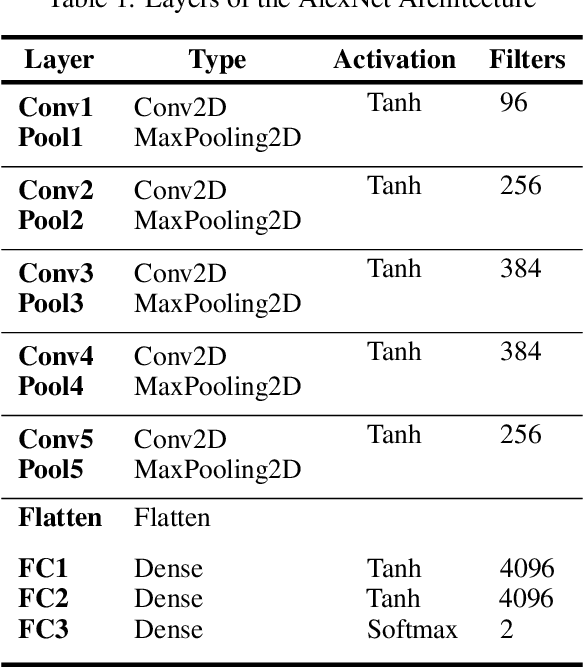
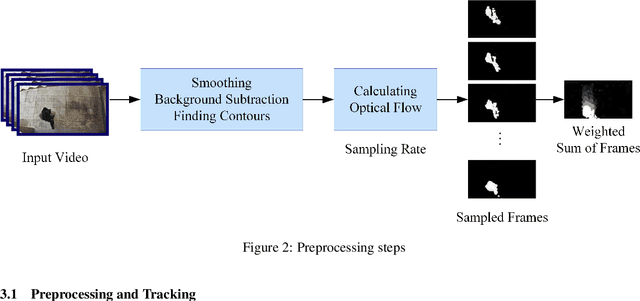
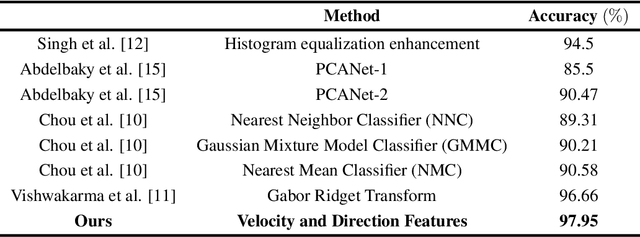
With the rapid increase in digital technologies, most fields of study include recognition of human activity and intention recognition, which are essential in smart environments. In this study, we equipped the activity recognition system with the ability to recognize intentions by affecting the pace of movement of individuals in the representation of images. Using this technology in various environments such as elevators and automatic doors will lead to identifying those who intend to pass the automatic door from those who are passing by. This system, if applied in elevators and automatic doors, will save energy and increase efficiency. For this study, data preparation is applied to combine the spatial and temporal features with the help of digital image processing principles. Nevertheless, unlike previous studies, only one AlexNet neural network is used instead of two-stream convolutional neural networks. Our embedded system was implemented with an accuracy of 98.78% on our intention recognition dataset. We also examined our data representation approach on other datasets, including HMDB-51, KTH, and Weizmann, and obtained accuracy of 78.48%, 97.95%, and 100%, respectively. The image recognition and neural network models were simulated and implemented using Xilinx simulators for the Xilinx ZCU102 board. The operating frequency of this embedded system is 333 MHz, and it works in real-time with 120 frames per second (fps).
Graph-Based Semi-Supervised Conditional Random Fields For Spoken Language Understanding Using Unaligned Data
Jan 30, 2017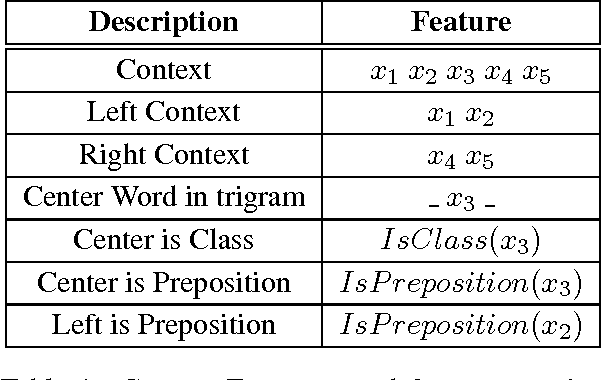
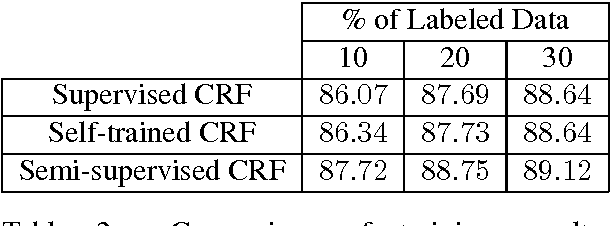
We experiment graph-based Semi-Supervised Learning (SSL) of Conditional Random Fields (CRF) for the application of Spoken Language Understanding (SLU) on unaligned data. The aligned labels for examples are obtained using IBM Model. We adapt a baseline semi-supervised CRF by defining new feature set and altering the label propagation algorithm. Our results demonstrate that our proposed approach significantly improves the performance of the supervised model by utilizing the knowledge gained from the graph.
Dimensionality reduction based on Distance Preservation to Local Mean (DPLM) for SPD matrices and its application in BCI
Jul 29, 2016
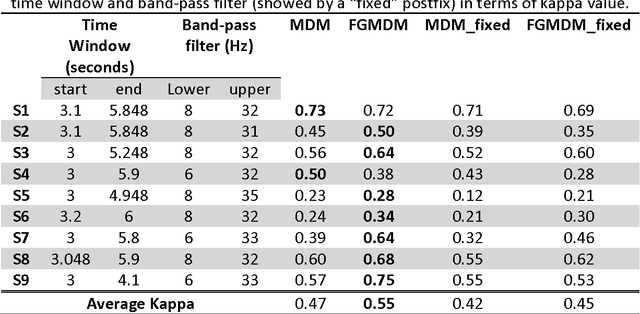
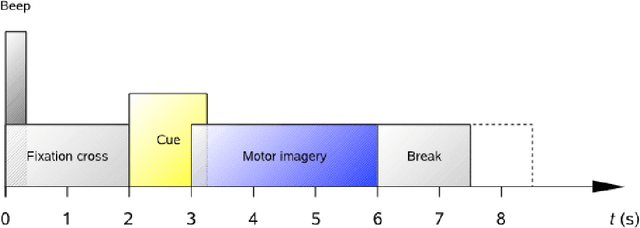
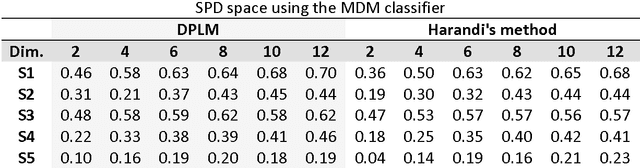
In this paper, we propose a nonlinear dimensionality reduction algorithm for the manifold of Symmetric Positive Definite (SPD) matrices that considers the geometry of SPD matrices and provides a low dimensional representation of the manifold with high class discrimination. The proposed algorithm, tries to preserve the local structure of the data by preserving distance to local mean (DPLM) and also provides an implicit projection matrix. DPLM is linear in terms of the number of training samples and may use the label information when they are available in order to performance improvement in classification tasks. We performed several experiments on the multi-class dataset IIa from BCI competition IV. The results show that our approach as dimensionality reduction technique - leads to superior results in comparison with other competitor in the related literature because of its robustness against outliers. The experiments confirm that the combination of DPLM with FGMDM as the classifier leads to the state of the art performance on this dataset.
A Framework for learning multi-agent dynamic formation strategy in real-time applications
Aug 01, 2014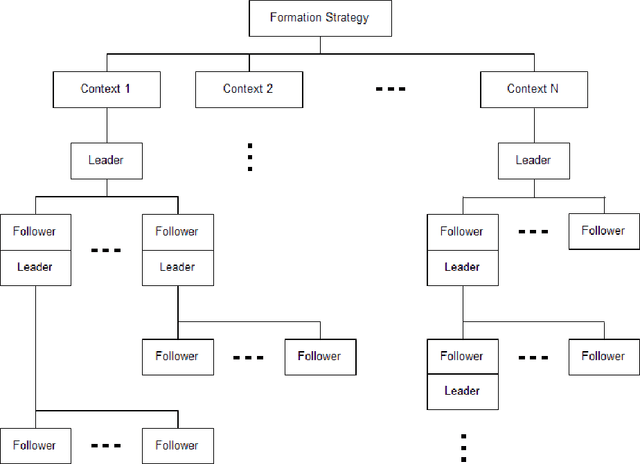
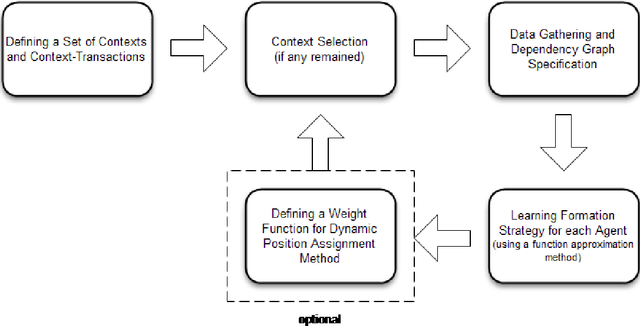
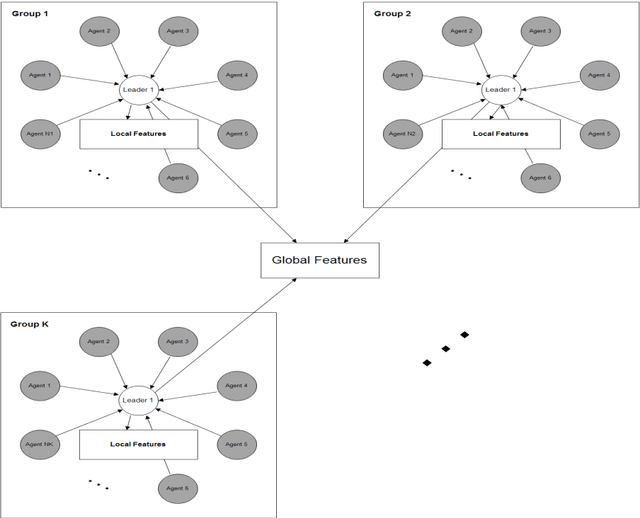
Formation strategy is one of the most important parts of many multi-agent systems with many applications in real world problems. In this paper, a framework for learning this task in a limited domain (restricted environment) is proposed. In this framework, agents learn either directly by observing an expert behavior or indirectly by observing other agents or objects behavior. First, a group of algorithms for learning formation strategy based on limited features will be presented. Due to distributed and complex nature of many multi-agent systems, it is impossible to include all features directly in the learning process; thus, a modular scheme is proposed in order to reduce the number of features. In this method, some important features have indirect influence in learning instead of directly involving them as input features. This framework has the ability to dynamically assign a group of positions to a group of agents to improve system performance. In addition, it can change the formation strategy when the context changes. Finally, this framework is able to automatically produce many complex and flexible formation strategy algorithms without directly involving an expert to present and implement such complex algorithms.