 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemi-supervised Vector-Quantization in Visual SLAM using HGCN
Jul 14, 2022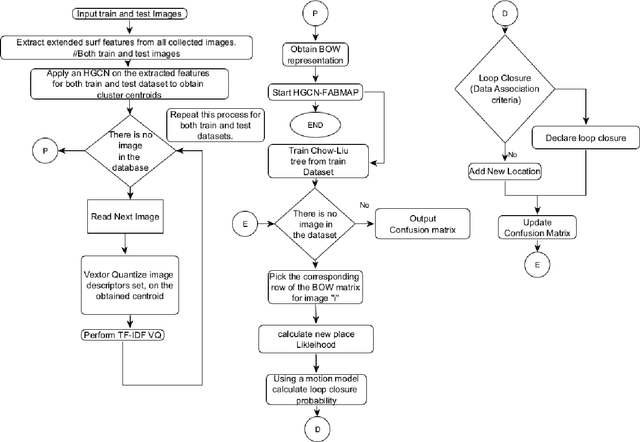
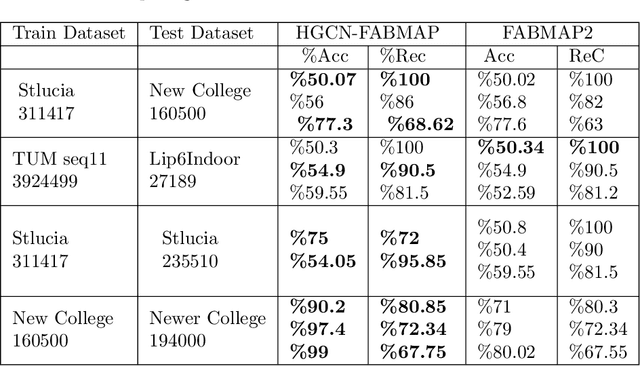

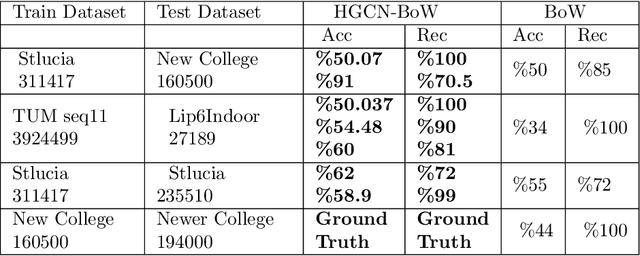
In this paper, two semi-supervised appearance based loop closure detection technique, HGCN-FABMAP and HGCN-BoW are introduced. Furthermore an extension to the current state of the art localization SLAM algorithm, ORB-SLAM, is presented. The proposed HGCN-FABMAP method is implemented in an off-line manner incorporating Bayesian probabilistic schema for loop detection decision making. Specifically, we let a Hyperbolic Graph Convolutional Neural Network (HGCN) to operate over the SURF features graph space, and perform vector quantization part of the SLAM procedure. This part previously was performed in an unsupervised manner using algorithms like HKmeans, kmeans++,..etc. The main Advantage of using HGCN, is that it scales linearly in number of graph edges. Experimental results shows that HGCN-FABMAP algorithm needs far more cluster centroids than HGCN-ORB, otherwise it fails to detect loop closures. Therefore we consider HGCN-ORB to be more efficient in terms of memory consumption, also we conclude the superiority of HGCN-BoW and HGCN-FABMAP with respect to other algorithms.
Self-supervised Vector-Quantization in Visual SLAM using Deep Convolutional Autoencoders
Jul 14, 2022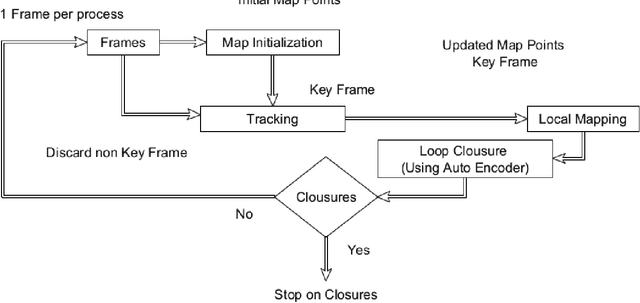
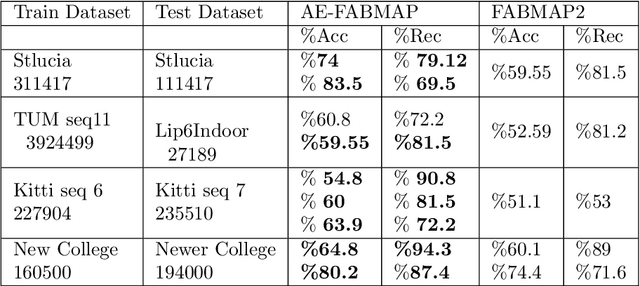
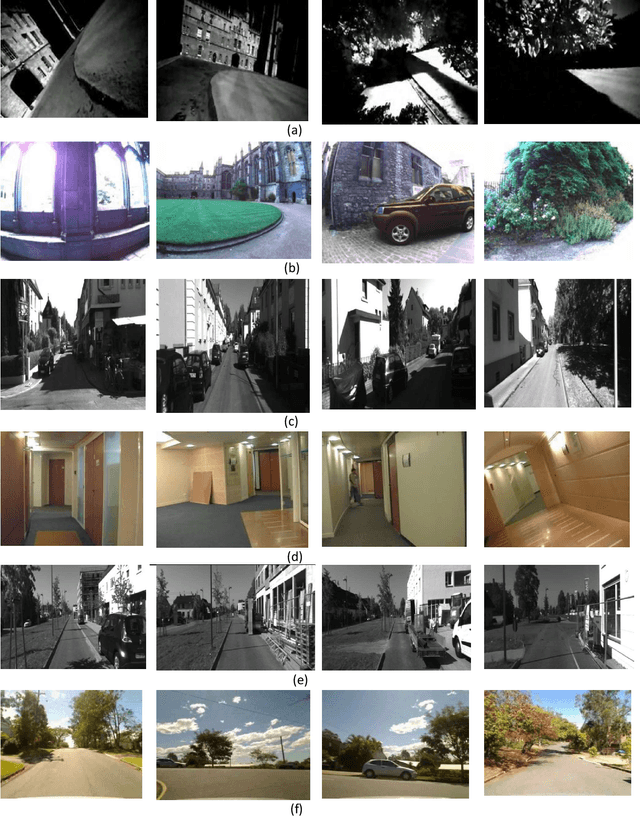
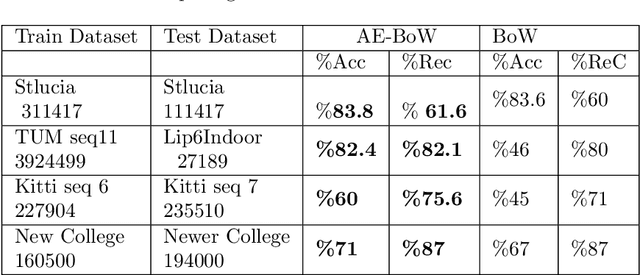
In this paper, we introduce AE-FABMAP, a new self-supervised bag of words-based SLAM method. We also present AE-ORB-SLAM, a modified version of the current state of the art BoW-based path planning algorithm. That is, we have used a deep convolutional autoencoder to find loop closures. In the context of bag of words visual SLAM, vector quantization (VQ) is considered as the most time-consuming part of the SLAM procedure, which is usually performed in the offline phase of the SLAM algorithm using unsupervised algorithms such as Kmeans++. We have addressed the loop closure detection part of the BoW-based SLAM methods in a self-supervised manner, by integrating an autoencoder for doing vector quantization. This approach can increase the accuracy of large-scale SLAM, where plenty of unlabeled data is available. The main advantage of using a self-supervised is that it can help reducing the amount of labeling. Furthermore, experiments show that autoencoders are far more efficient than semi-supervised methods like graph convolutional neural networks, in terms of speed and memory consumption. We integrated this method into the state of the art long range appearance based visual bag of word SLAM, FABMAP2, also in ORB-SLAM. Experiments demonstrate the superiority of this approach in indoor and outdoor datasets over regular FABMAP2 in all cases, and it achieves higher accuracy in loop closure detection and trajectory generation.