 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemi-automated Virtual Unfolded View Generation Method of Stomach from CT Volumes
Jan 14, 2022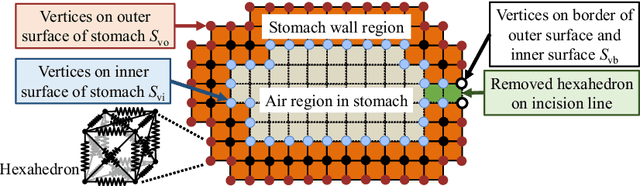
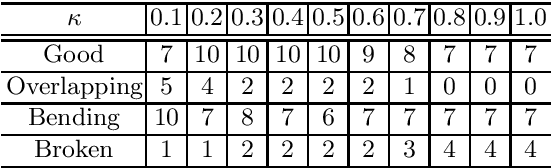
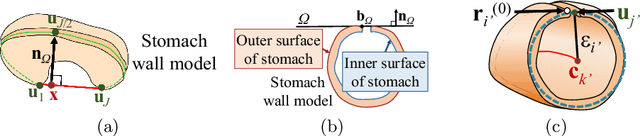

CT image-based diagnosis of the stomach is developed as a new way of diagnostic method. A virtual unfolded (VU) view is suitable for displaying its wall. In this paper, we propose a semi-automated method for generating VU views of the stomach. Our method requires minimum manual operations. The determination of the unfolding forces and the termination of the unfolding process are automated. The unfolded shape of the stomach is estimated based on its radius. The unfolding forces are determined so that the stomach wall is deformed to the expected shape. The iterative deformation process is terminated if the difference of the shapes between the deformed shape and expected shape is small. Our experiments using 67 CT volumes showed that our proposed method can generate good VU views for 76.1% cases.
* Accepted paper as a poster presentation at MICCAI 2013 (International Conference on Medical Image Computing and Computer-Assisted Intervention), Nagoya, Japan
Colonoscope tracking method based on shape estimation network
Apr 20, 2020This paper presents a colonoscope tracking method utilizing a colon shape estimation method. CT colonography is used as a less-invasive colon diagnosis method. If colonic polyps or early-stage cancers are found, they are removed in a colonoscopic examination. In the colonoscopic examination, understanding where the colonoscope running in the colon is difficult. A colonoscope navigation system is necessary to reduce overlooking of polyps. We propose a colonoscope tracking method for navigation systems. Previous colonoscope tracking methods caused large tracking errors because they do not consider deformations of the colon during colonoscope insertions. We utilize the shape estimation network (SEN), which estimates deformed colon shape during colonoscope insertions. The SEN is a neural network containing long short-term memory (LSTM) layer. To perform colon shape estimation suitable to the real clinical situation, we trained the SEN using data obtained during colonoscope operations of physicians. The proposed tracking method performs mapping of the colonoscope tip position to a position in the colon using estimation results of the SEN. We evaluated the proposed method in a phantom study. We confirmed that tracking errors of the proposed method was enough small to perform navigation in the ascending, transverse, and descending colons.
* Accepted paper as an oral presentation at SPIE Medical Imaging 2019, San Diego, CA, USA
Colon Shape Estimation Method for Colonoscope Tracking using Recurrent Neural Networks
Apr 20, 2020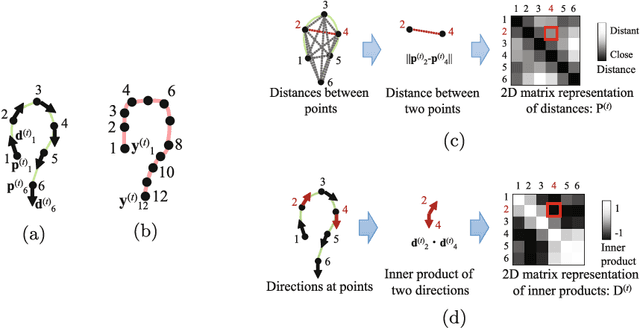
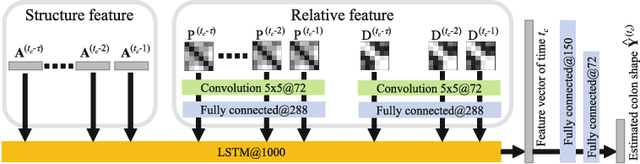
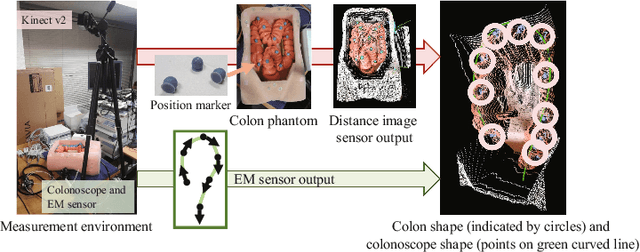
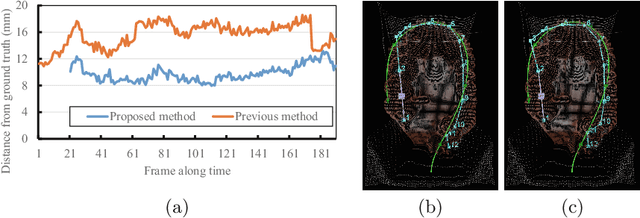
We propose an estimation method using a recurrent neural network (RNN) of the colon's shape where deformation was occurred by a colonoscope insertion. Colonoscope tracking or a navigation system that navigates physician to polyp positions is needed to reduce such complications as colon perforation. Previous tracking methods caused large tracking errors at the transverse and sigmoid colons because these areas largely deform during colonoscope insertion. Colon deformation should be taken into account in tracking processes. We propose a colon deformation estimation method using RNN and obtain the colonoscope shape from electromagnetic sensors during its insertion into the colon. This method obtains positional, directional, and an insertion length from the colonoscope shape. From its shape, we also calculate the relative features that represent the positional and directional relationships between two points on a colonoscope. Long short-term memory is used to estimate the current colon shape from the past transition of the features of the colonoscope shape. We performed colon shape estimation in a phantom study and correctly estimated the colon shapes during colonoscope insertion with 12.39 (mm) estimation error.
* Accepted paper as a poster presentation at MICCAI 2018 (International Conference on Medical Image Computing and Computer-Assisted Intervention), Granada, Spain
Machine learning-based colon deformation estimation method for colonoscope tracking
Jun 08, 2018This paper presents a colon deformation estimation method, which can be used to estimate colon deformations during colonoscope insertions. Colonoscope tracking or navigation system that navigates a physician to polyp positions during a colonoscope insertion is required to reduce complications such as colon perforation. A previous colonoscope tracking method obtains a colonoscope position in the colon by registering a colonoscope shape and a colon shape. The colonoscope shape is obtained using an electromagnetic sensor, and the colon shape is obtained from a CT volume. However, large tracking errors were observed due to colon deformations occurred during colonoscope insertions. Such deformations make the registration difficult. Because the colon deformation is caused by a colonoscope, there is a strong relationship between the colon deformation and the colonoscope shape. An estimation method of colon deformations occur during colonoscope insertions is necessary to reduce tracking errors. We propose a colon deformation estimation method. This method is used to estimate a deformed colon shape from a colonoscope shape. We use the regression forests algorithm to estimate a deformed colon shape. The regression forests algorithm is trained using pairs of colon and colonoscope shapes, which contains deformations occur during colonoscope insertions. As a preliminary study, we utilized the method to estimate deformations of a colon phantom. In our experiments, the proposed method correctly estimated deformed colon phantom shapes.
* Accepted paper for oral presentation at SPIE Medical Imaging 2018, Houston, TX, USA