 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Multi-Plane Segmentation Based on GPU Accelerated High-Resolution 3D Voxel Mapping for Legged Robot Locomotion
Oct 02, 2025This paper proposes a real-time multi-plane segmentation method based on GPU-accelerated high-resolution 3D voxel mapping for legged robot locomotion. Existing online planar mapping approaches struggle to balance accuracy and computational efficiency: direct depth image segmentation from specific sensors suffers from poor temporal integration, height map-based methods cannot represent complex 3D structures like overhangs, and voxel-based plane segmentation remains unexplored for real-time applications. To address these limitations, we develop a novel framework that integrates vertex-based connected component labeling with random sample consensus based plane detection and convex hull, leveraging GPU parallel computing to rapidly extract planar regions from point clouds accumulated in high-resolution 3D voxel maps. Experimental results demonstrate that the proposed method achieves fast and accurate 3D multi-plane segmentation at over 30 Hz update rate even at a resolution of 0.01 m, enabling the detected planes to be utilized in real time for locomotion tasks. Furthermore, we validate the effectiveness of our approach through experiments in both simulated environments and physical legged robot platforms, confirming robust locomotion performance when considering 3D planar structures.
Extrinsic Calibration of Multiple LiDARs for a Mobile Robot based on Floor Plane And Object Segmentation
Mar 21, 2024



Mobile robots equipped with multiple light detection and ranging (LiDARs) and capable of recognizing their surroundings are increasing due to the minitualization and cost reduction of LiDAR. This paper proposes a target-less extrinsic calibration method of multiple LiDARs with non-overlapping field of view (FoV). The proposed method uses accumulated point clouds of floor plane and objects while in motion. It enables accurate calibration with challenging configuration of LiDARs that directed towards the floor plane, caused by biased feature values. Additionally, the method includes a noise removal module that considers the scanning pattern to address bleeding points, which are noises of significant source of error in point cloud alignment using high-density LiDARs. Evaluations through simulation demonstrate that the proposed method achieved higher accuracy extrinsic calibration with two and four LiDARs than conventional methods, regardless type of objects. Furthermore, the experiments using a real mobile robot has shown that our proposed noise removal module can eliminate noise more precisely than conventional methods, and the estimated extrinsic parameters have successfully created consistent 3D maps.
Real-time Perceptive Motion Control using Control Barrier Functions with Analytical Smoothing for Six-Wheeled-Telescopic-Legged Robot Tachyon 3
Oct 18, 2023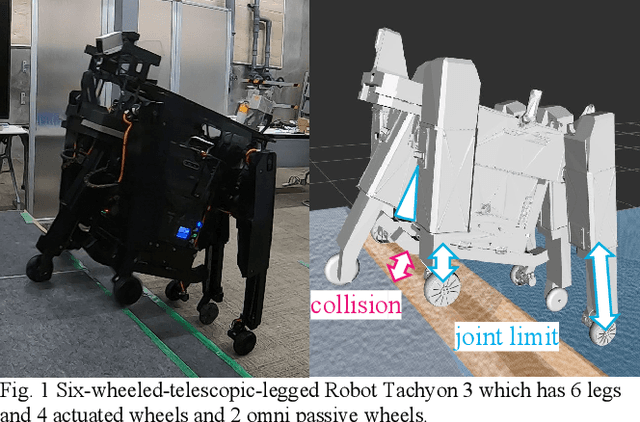
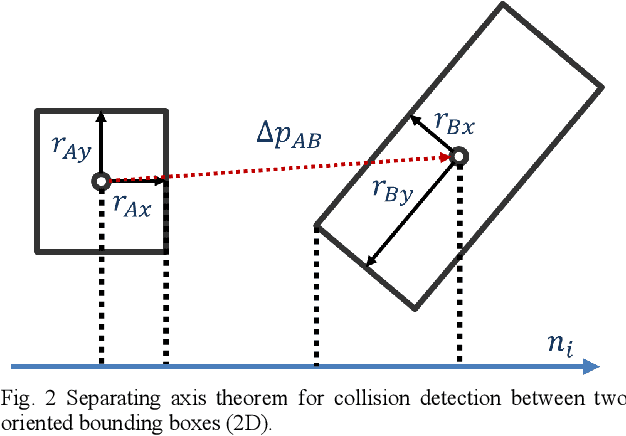
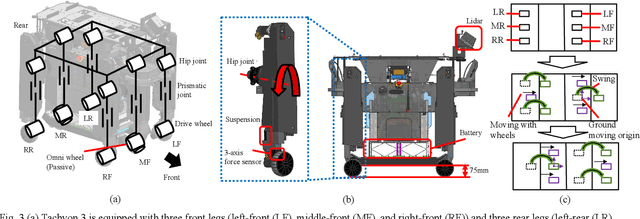
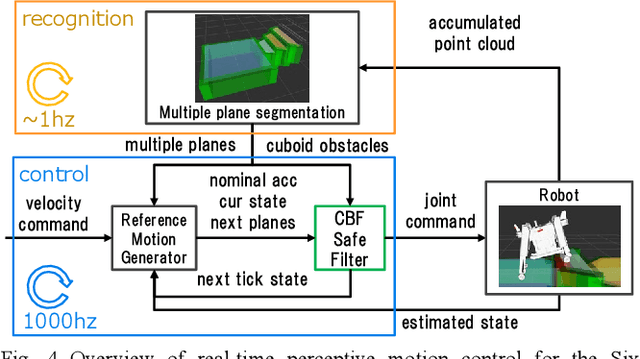
To achieve safe legged locomotion, it is important to generate motion in real-time considering various constraints in robots and environments. In this study, we propose a lightweight real-time perspective motion control system for the newly developed six-wheeled-telescopic-legged robot, Tachyon 3. In the proposed method, analytically smoothed constraints including Smooth Separating Axis Theorem (Smooth SAT) as a novel higher order differentiable collision detection for 3D shapes is applied to the Control Barrier Function (CBF). The proposed system integrating the CBF achieves online motion generation in a short control cycle of 1 ms that satisfies joint limitations, environmental collision avoidance and safe convex foothold constraints. The efficiency of Smooth SAT is shown from the collision detection time of 1 us or less and the CBF constraint computation time for Tachyon3 of several us. Furthermore, the effectiveness of the proposed system is verified through the stair-climbing motion, integrating online recognition in a simulation and a real machine.