 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDevelopment of a Compact Robust Passive Transformable Omni-Ball for Enhanced Step-Climbing and Vibration Reduction
Mar 21, 2024This paper introduces the Passive Transformable Omni-Ball (PTOB), an advanced omnidirectional wheel engineered to enhance step-climbing performance, incorporate built-in actuators, diminish vibrations, and fortify structural integrity. By modifying the omni-ball's structure from two to three segments, we have achieved improved in-wheel actuation and a reduction in vibrational feedback. Additionally, we have implemented a sliding mechanism in the follower wheels to boost the wheel's step-climbing abilities. A prototype with a 127 mm diameter PTOB was constructed, which confirmed its functionality for omnidirectional movement and internal actuation. Compared to a traditional omni-wheel, the PTOB demonstrated a comparable level of vibration while offering superior capabilities. Extensive testing in varied settings showed that the PTOB can adeptly handle step obstacles up to 45 mm, equivalent to 35 $\%$ of the wheel's diameter, in both the forward and lateral directions. The PTOB showcased robust construction and proved to be versatile in navigating through environments with diverse obstacles.
Real-time Perceptive Motion Control using Control Barrier Functions with Analytical Smoothing for Six-Wheeled-Telescopic-Legged Robot Tachyon 3
Oct 18, 2023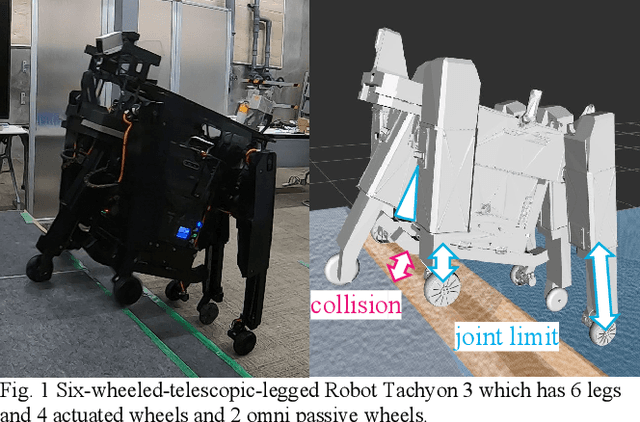
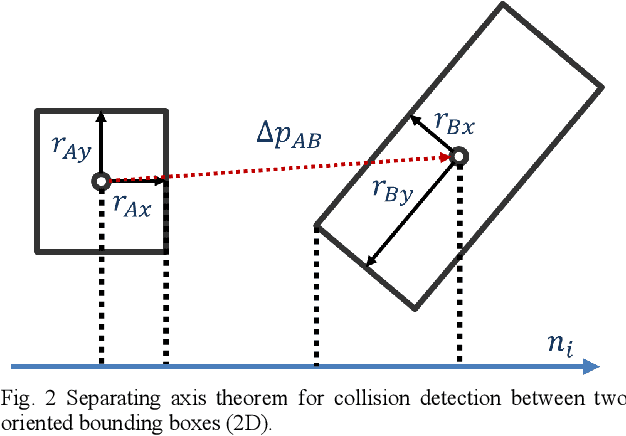
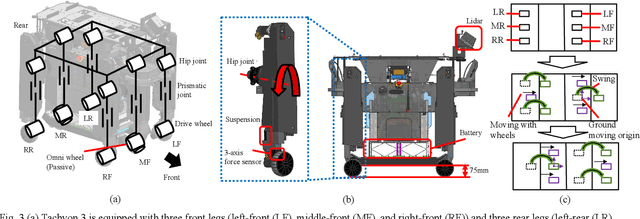
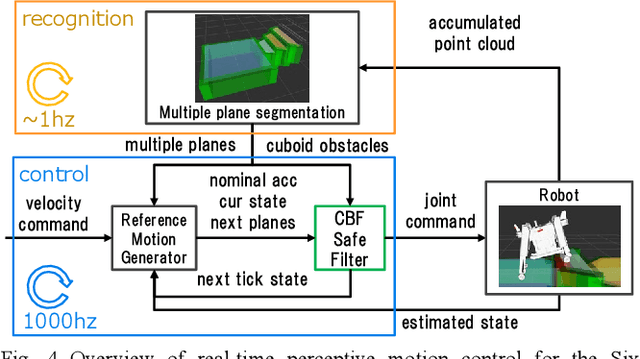
To achieve safe legged locomotion, it is important to generate motion in real-time considering various constraints in robots and environments. In this study, we propose a lightweight real-time perspective motion control system for the newly developed six-wheeled-telescopic-legged robot, Tachyon 3. In the proposed method, analytically smoothed constraints including Smooth Separating Axis Theorem (Smooth SAT) as a novel higher order differentiable collision detection for 3D shapes is applied to the Control Barrier Function (CBF). The proposed system integrating the CBF achieves online motion generation in a short control cycle of 1 ms that satisfies joint limitations, environmental collision avoidance and safe convex foothold constraints. The efficiency of Smooth SAT is shown from the collision detection time of 1 us or less and the CBF constraint computation time for Tachyon3 of several us. Furthermore, the effectiveness of the proposed system is verified through the stair-climbing motion, integrating online recognition in a simulation and a real machine.