 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBalancing Performance and Human Autonomy with Implicit Guidance Agent
Sep 01, 2021



The human-agent team, which is a problem in which humans and autonomous agents collaborate to achieve one task, is typical in human-AI collaboration. For effective collaboration, humans want to have an effective plan, but in realistic situations, they might have difficulty calculating the best plan due to cognitive limitations. In this case, guidance from an agent that has many computational resources may be useful. However, if an agent guides the human behavior explicitly, the human may feel that they have lost autonomy and are being controlled by the agent. We therefore investigated implicit guidance offered by means of an agent's behavior. With this type of guidance, the agent acts in a way that makes it easy for the human to find an effective plan for a collaborative task, and the human can then improve the plan. Since the human improves their plan voluntarily, he or she maintains autonomy. We modeled a collaborative agent with implicit guidance by integrating the Bayesian Theory of Mind into existing collaborative-planning algorithms and demonstrated through a behavioral experiment that implicit guidance is effective for enabling humans to maintain a balance between improving their plans and retaining autonomy.
Modeling Human Inference of Others' Intentions in Complex Situations with Plan Predictability Bias
Sep 27, 2018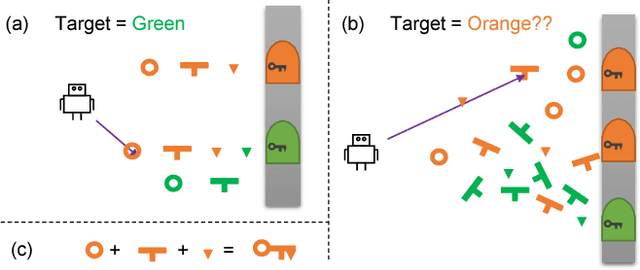


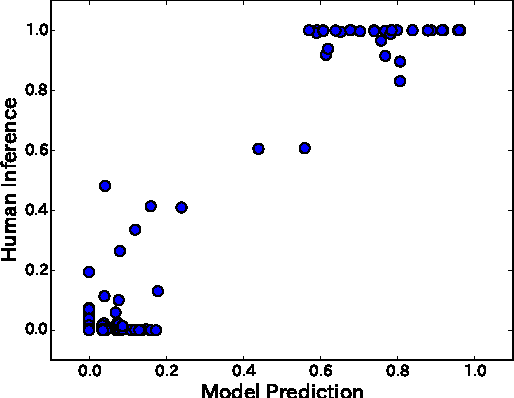
A recent approach based on Bayesian inverse planning for the "theory of mind" has shown good performance in modeling human cognition. However, perfect inverse planning differs from human cognition during one kind of complex tasks due to human bounded rationality. One example is an environment in which there are many available plans for achieving a specific goal. We propose a "plan predictability oriented model" as a model of inferring other peoples' goals in complex environments. This model adds the bias that people prefer predictable plans. This bias is calculated with simple plan prediction. We tested this model with a behavioral experiment in which humans observed the partial path of goal-directed actions. Our model had a higher correlation with human inference. We also confirmed the robustness of our model with complex tasks and determined that it can be improved by taking account of individual differences in "bounded rationality".
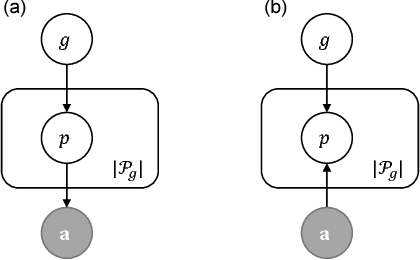
Modeling Human Understanding of Complex Intentional Action with a Bayesian Nonparametric Subgoal Model
Dec 03, 2015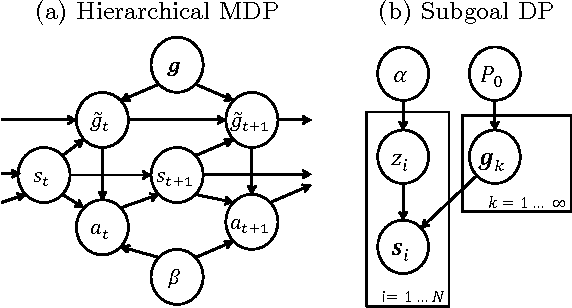

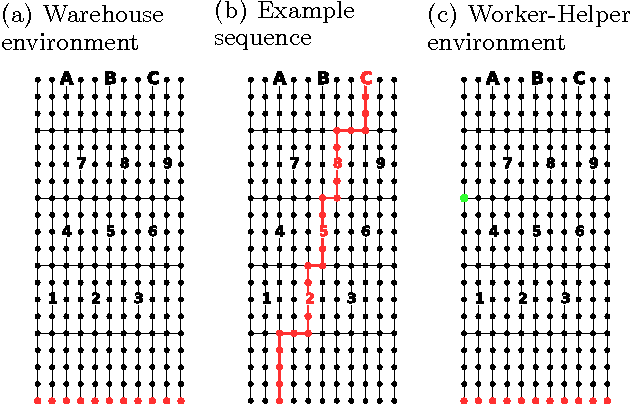
Most human behaviors consist of multiple parts, steps, or subtasks. These structures guide our action planning and execution, but when we observe others, the latent structure of their actions is typically unobservable, and must be inferred in order to learn new skills by demonstration, or to assist others in completing their tasks. For example, an assistant who has learned the subgoal structure of a colleague's task can more rapidly recognize and support their actions as they unfold. Here we model how humans infer subgoals from observations of complex action sequences using a nonparametric Bayesian model, which assumes that observed actions are generated by approximately rational planning over unknown subgoal sequences. We test this model with a behavioral experiment in which humans observed different series of goal-directed actions, and inferred both the number and composition of the subgoal sequences associated with each goal. The Bayesian model predicts human subgoal inferences with high accuracy, and significantly better than several alternative models and straightforward heuristics. Motivated by this result, we simulate how learning and inference of subgoals can improve performance in an artificial user assistance task. The Bayesian model learns the correct subgoals from fewer observations, and better assists users by more rapidly and accurately inferring the goal of their actions than alternative approaches.
* Accepted at AAAI 16