 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling Human Inference of Others' Intentions in Complex Situations with Plan Predictability Bias
Paper and Code
Sep 27, 2018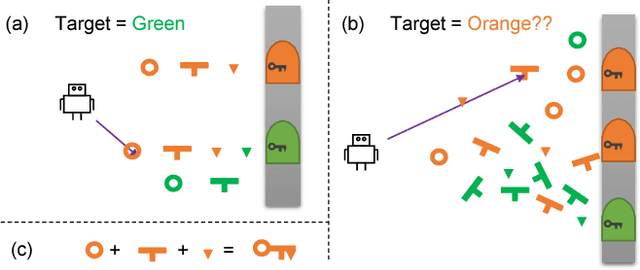
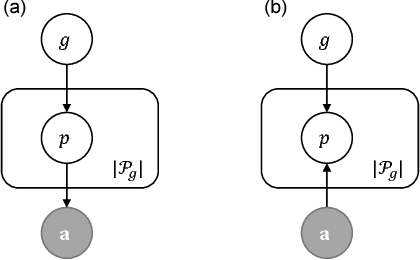


A recent approach based on Bayesian inverse planning for the "theory of mind" has shown good performance in modeling human cognition. However, perfect inverse planning differs from human cognition during one kind of complex tasks due to human bounded rationality. One example is an environment in which there are many available plans for achieving a specific goal. We propose a "plan predictability oriented model" as a model of inferring other peoples' goals in complex environments. This model adds the bias that people prefer predictable plans. This bias is calculated with simple plan prediction. We tested this model with a behavioral experiment in which humans observed the partial path of goal-directed actions. Our model had a higher correlation with human inference. We also confirmed the robustness of our model with complex tasks and determined that it can be improved by taking account of individual differences in "bounded rationality".