 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWaveVerif: Acoustic Side-Channel based Verification of Robotic Workflows
Oct 29, 2025



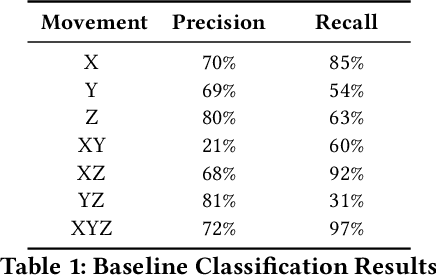
In this paper, we present a framework that uses acoustic side-channel analysis (ASCA) to monitor and verify whether a robot correctly executes its intended commands. We develop and evaluate a machine-learning-based workflow verification system that uses acoustic emissions generated by robotic movements. The system can determine whether real-time behavior is consistent with expected commands. The evaluation takes into account movement speed, direction, and microphone distance. The results show that individual robot movements can be validated with over 80% accuracy under baseline conditions using four different classifiers: Support Vector Machine (SVM), Deep Neural Network (DNN), Recurrent Neural Network (RNN), and Convolutional Neural Network (CNN). Additionally, workflows such as pick-and-place and packing could be identified with similarly high confidence. Our findings demonstrate that acoustic signals can support real-time, low-cost, passive verification in sensitive robotic environments without requiring hardware modifications.
Communicating Complex Decisions in Robot-Assisted Therapy
Mar 24, 2023Socially Assistive Robots (SARs) have shown promising potential in therapeutic scenarios as decision-making instructors or motivational companions. In human-human therapy, experts often communicate the thought process behind the decisions they make to promote transparency and build trust. As research aims to incorporate more complex decision-making models into these robots to drive better interaction, the ability for the SAR to explain its decisions becomes an increasing challenge. We present the latest examples of complex SAR decision-makers. We argue that, based on the importance of transparent communication in human-human therapy, SARs should incorporate such components into their design. To stimulate discussion around this topic, we present a set of design considerations for researchers.
Fingerprinting Robot Movements via Acoustic Side Channel
Sep 21, 2022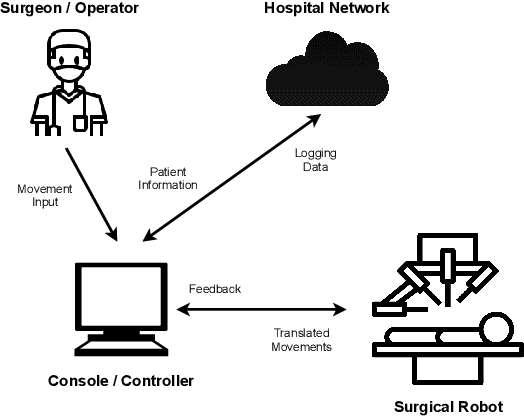
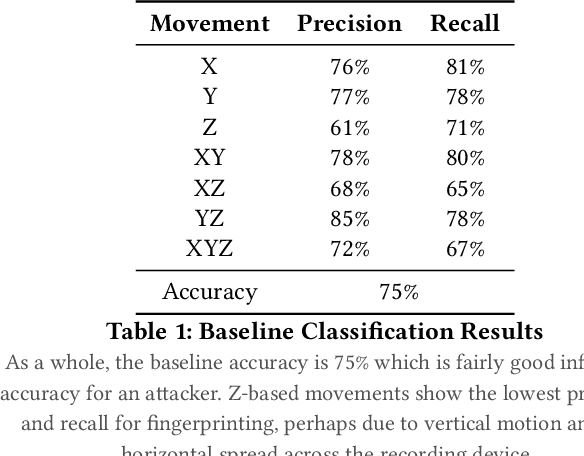
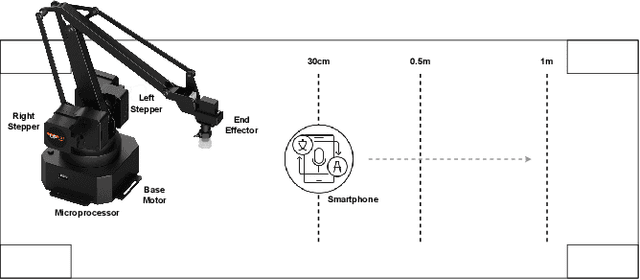
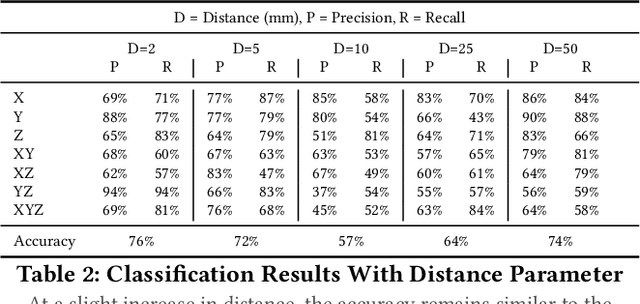
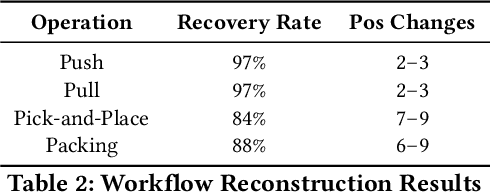
In this paper, we present an acoustic side channel attack which makes use of smartphone microphones recording a robot in operation to exploit acoustic properties of the sound to fingerprint a robot's movements. In this work we consider the possibility of an insider adversary who is within physical proximity of a robotic system (such as a technician or robot operator), equipped with only their smartphone microphone. Through the acoustic side-channel, we demonstrate that it is indeed possible to fingerprint not only individual robot movements within 3D space, but also patterns of movements which could lead to inferring the purpose of the movements (i.e. surgical procedures which a surgical robot is undertaking) and hence, resulting in potential privacy violations. Upon evaluation, we find that individual robot movements can be fingerprinted with around 75% accuracy, decreasing slightly with more fine-grained movement meta-data such as distance and speed. Furthermore, workflows could be reconstructed with around 62% accuracy as a whole, with more complex movements such as pick-and-place or packing reconstructed with near perfect accuracy. As well as this, in some environments such as surgical settings, audio may be recorded and transmitted over VoIP, such as for education/teaching purposes or in remote telemedicine. The question here is, can the same attack be successful even when VoIP communication is employed, and how does packet loss impact the captured audio and the success of the attack? Using the same characteristics of acoustic sound for plain audio captured by the smartphone, the attack was 90% accurate in fingerprinting VoIP samples on average, 15% higher than the baseline without the VoIP codec employed. This opens up new research questions regarding anonymous communications to protect robotic systems from acoustic side channel attacks via VoIP communication networks.
Reconstructing Robot Operations via Radio-Frequency Side-Channel
Sep 21, 2022
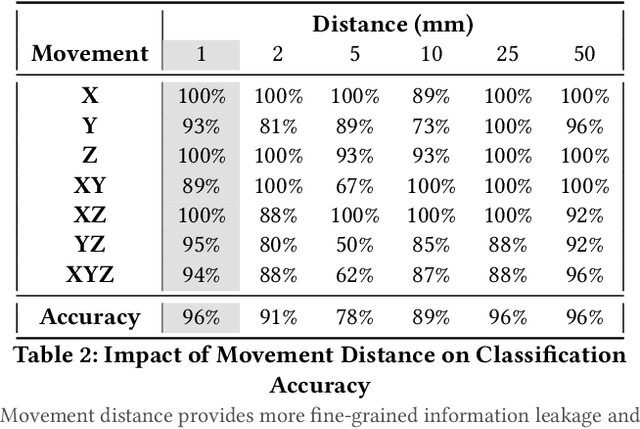
Connected teleoperated robotic systems play a key role in ensuring operational workflows are carried out with high levels of accuracy and low margins of error. In recent years, a variety of attacks have been proposed that actively target the robot itself from the cyber domain. However, little attention has been paid to the capabilities of a passive attacker. In this work, we investigate whether an insider adversary can accurately fingerprint robot movements and operational warehousing workflows via the radio frequency side channel in a stealthy manner. Using an SVM for classification, we found that an adversary can fingerprint individual robot movements with at least 96% accuracy, increasing to near perfect accuracy when reconstructing entire warehousing workflows.
Can You Still See Me?: Reconstructing Robot Operations Over End-to-End Encrypted Channels
May 17, 2022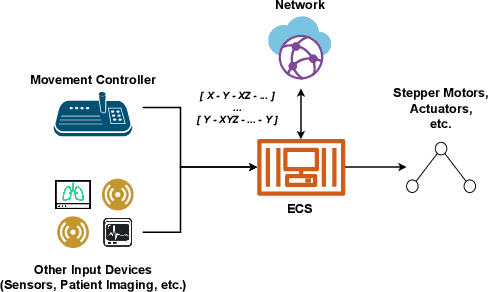
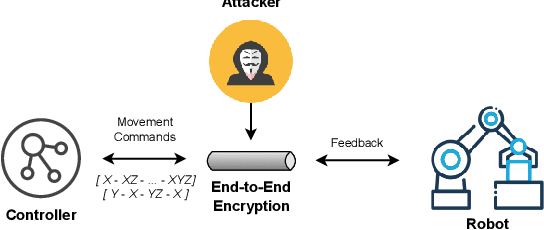
Connected robots play a key role in Industry 4.0, providing automation and higher efficiency for many industrial workflows. Unfortunately, these robots can leak sensitive information regarding these operational workflows to remote adversaries. While there exists mandates for the use of end-to-end encryption for data transmission in such settings, it is entirely possible for passive adversaries to fingerprint and reconstruct entire workflows being carried out -- establishing an understanding of how facilities operate. In this paper, we investigate whether a remote attacker can accurately fingerprint robot movements and ultimately reconstruct operational workflows. Using a neural network approach to traffic analysis, we find that one can predict TLS-encrypted movements with around \textasciitilde60\% accuracy, increasing to near-perfect accuracy under realistic network conditions. Further, we also find that attackers can reconstruct warehousing workflows with similar success. Ultimately, simply adopting best cybersecurity practices is clearly not enough to stop even weak (passive) adversaries.
Privacy with Surgical Robotics: Challenges in Applying Contextual Privacy Theory
Sep 04, 2019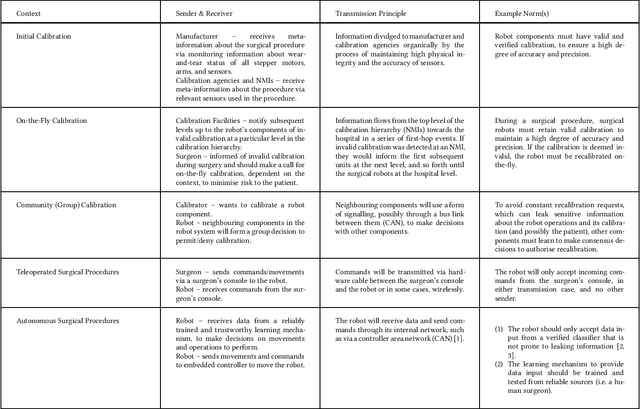
The use of connected surgical robotics to automate medical procedures presents new privacy challenges. We argue that conventional patient consent protocols no longer work. Indeed robots that replace human surgeons take on an extraordinary level of responsibility. Surgeons undergo years of training and peer review in a strongly regulated environment, and derive trust via a patient's faith in the hospital system. Robots on the other hand derive trust differently, via the integrity of the software that governs their operation. From a privacy perspective, there are two fundamental shifts. First, the threat model has shifted from one where the humans involved were untrusted to one where the robotic software is untrusted. Second, the basic unit of privacy control is no longer a medical record, but is replaced by four new basic units: the subject on which the robot is taking action; the tools used by the robot; the sensors (i.e data) the robot can access; and, finally access to monitoring and calibration services which afford correct operation of the robot. We suggest that contextual privacy provides useful theoretical tools to solve the privacy problems posed by surgical robots. However, it also poses some challenges: not least that the complexity of the contextual-privacy policies, if rigorously specified to achieve verification and enforceability, will be exceedingly high to directly expose to humans that review contextual privacy policies. A medical robot works with both information and physical material. While informational norms allow for judgements about contextual integrity and the transmission principle governs the constraints applied on information transfer, nothing is said about material property. Certainly, contextual privacy provides an anchor for useful notions of privacy in this scenario and thus should be considered to be extended to cover both information and material flows.
Security Landscape for Robotics
Apr 05, 2019In this paper, the current state of security in robotics is described to be in need of review. When we consider safety mechanisms implemented in an Internet-connected robot, the requirement of safety becomes a crucial security requirement. Upon review of the current state of security in the field of robotics, four key requirements are in need of addressing: the supply chain for calibration, integrity and authenticity of commands (i.e. in teleoperation), physical-plane security and finally, secure, controlled logging and auditing.
An Access Control Model for Robot Calibration
Mar 21, 2019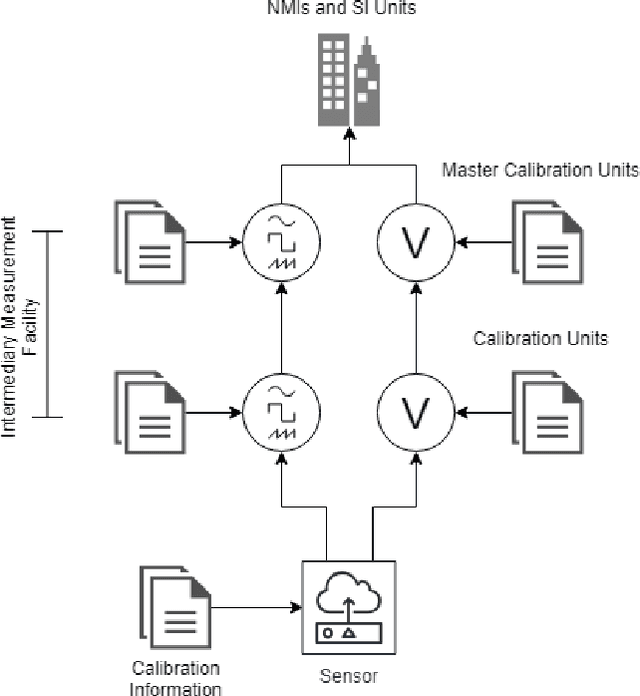
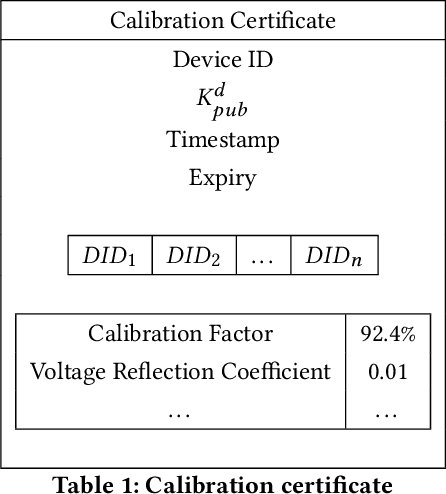
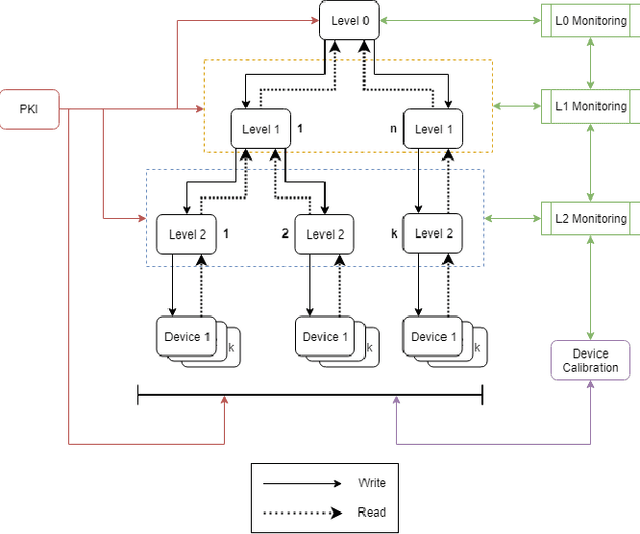
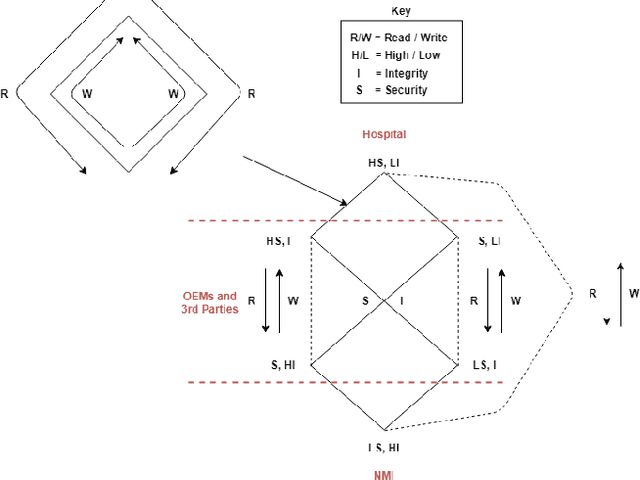
High assurance surgical robotic systems require robustness to both safety issues and security issues (i.e adversarial interference). In this work, we argue that safety and security are not disjoint properties, but that security is a safety requirement. Surgical robotics presents new information flow requirements that includes multiple levels of confidentiality and integrity, as well as the need for compartmentation arising from conflicts of interest. We develop an information flow model that derives from lattice-based access control. This model addresses the flow constraints of the calibration lifecycle of surgical robots - an important aspect of a high-assurance environment.