 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFingerprinting Robot Movements via Acoustic Side Channel
Sep 21, 2022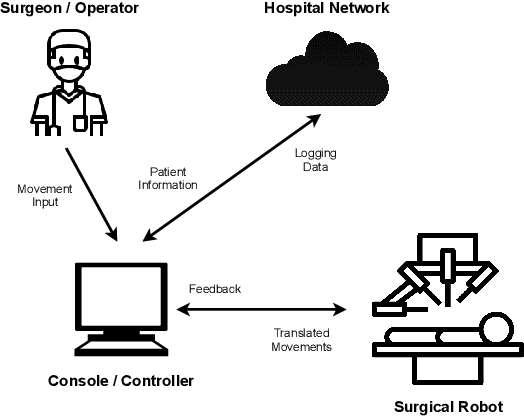
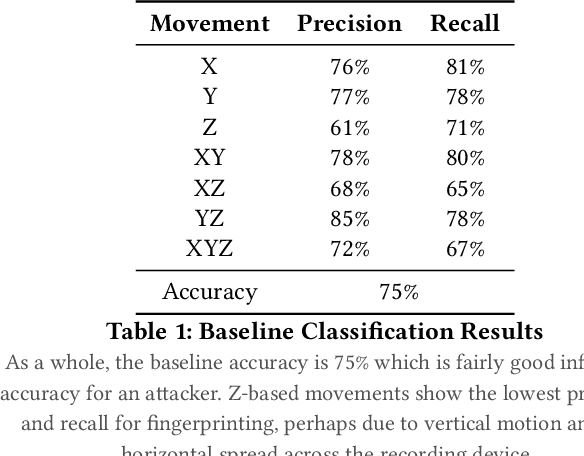
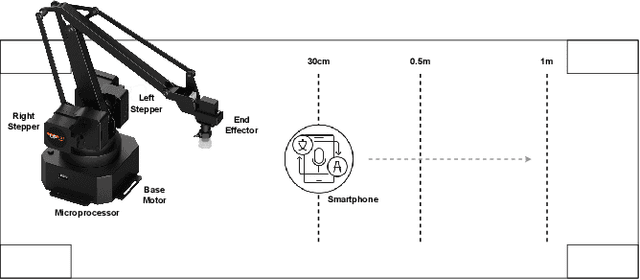
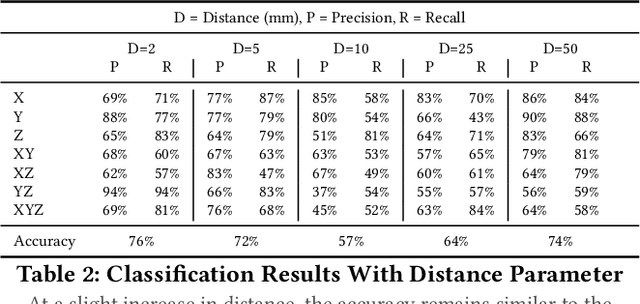
In this paper, we present an acoustic side channel attack which makes use of smartphone microphones recording a robot in operation to exploit acoustic properties of the sound to fingerprint a robot's movements. In this work we consider the possibility of an insider adversary who is within physical proximity of a robotic system (such as a technician or robot operator), equipped with only their smartphone microphone. Through the acoustic side-channel, we demonstrate that it is indeed possible to fingerprint not only individual robot movements within 3D space, but also patterns of movements which could lead to inferring the purpose of the movements (i.e. surgical procedures which a surgical robot is undertaking) and hence, resulting in potential privacy violations. Upon evaluation, we find that individual robot movements can be fingerprinted with around 75% accuracy, decreasing slightly with more fine-grained movement meta-data such as distance and speed. Furthermore, workflows could be reconstructed with around 62% accuracy as a whole, with more complex movements such as pick-and-place or packing reconstructed with near perfect accuracy. As well as this, in some environments such as surgical settings, audio may be recorded and transmitted over VoIP, such as for education/teaching purposes or in remote telemedicine. The question here is, can the same attack be successful even when VoIP communication is employed, and how does packet loss impact the captured audio and the success of the attack? Using the same characteristics of acoustic sound for plain audio captured by the smartphone, the attack was 90% accurate in fingerprinting VoIP samples on average, 15% higher than the baseline without the VoIP codec employed. This opens up new research questions regarding anonymous communications to protect robotic systems from acoustic side channel attacks via VoIP communication networks.
Reconstructing Robot Operations via Radio-Frequency Side-Channel
Sep 21, 2022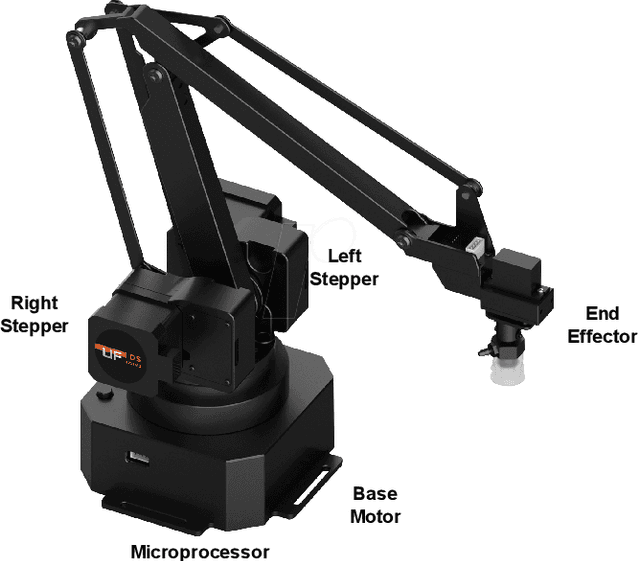
Connected teleoperated robotic systems play a key role in ensuring operational workflows are carried out with high levels of accuracy and low margins of error. In recent years, a variety of attacks have been proposed that actively target the robot itself from the cyber domain. However, little attention has been paid to the capabilities of a passive attacker. In this work, we investigate whether an insider adversary can accurately fingerprint robot movements and operational warehousing workflows via the radio frequency side channel in a stealthy manner. Using an SVM for classification, we found that an adversary can fingerprint individual robot movements with at least 96% accuracy, increasing to near perfect accuracy when reconstructing entire warehousing workflows.