 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan You Still See Me?: Reconstructing Robot Operations Over End-to-End Encrypted Channels
Paper and Code
May 17, 2022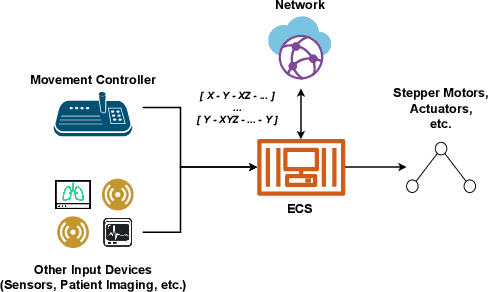
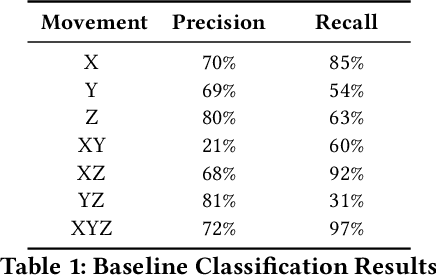
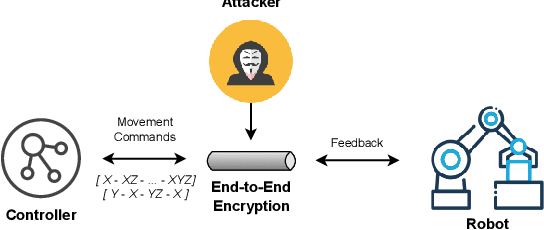
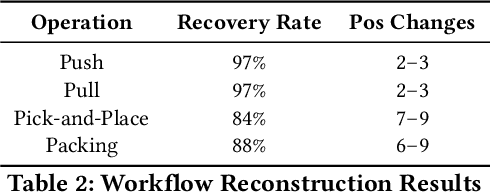
Connected robots play a key role in Industry 4.0, providing automation and higher efficiency for many industrial workflows. Unfortunately, these robots can leak sensitive information regarding these operational workflows to remote adversaries. While there exists mandates for the use of end-to-end encryption for data transmission in such settings, it is entirely possible for passive adversaries to fingerprint and reconstruct entire workflows being carried out -- establishing an understanding of how facilities operate. In this paper, we investigate whether a remote attacker can accurately fingerprint robot movements and ultimately reconstruct operational workflows. Using a neural network approach to traffic analysis, we find that one can predict TLS-encrypted movements with around \textasciitilde60\% accuracy, increasing to near-perfect accuracy under realistic network conditions. Further, we also find that attackers can reconstruct warehousing workflows with similar success. Ultimately, simply adopting best cybersecurity practices is clearly not enough to stop even weak (passive) adversaries.