 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-supervised Adaptive Weighting for Cooperative Perception in V2V Communications
Dec 16, 2023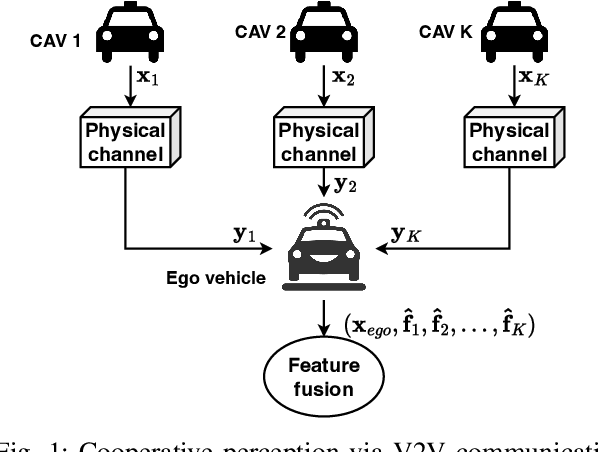
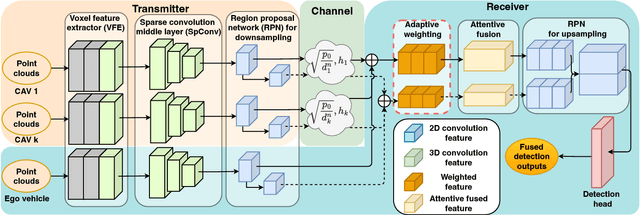
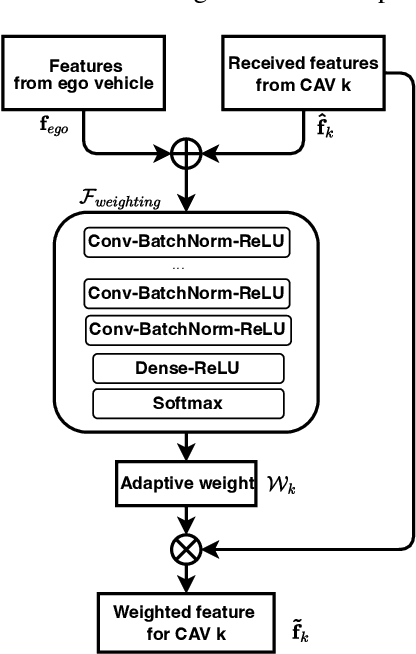
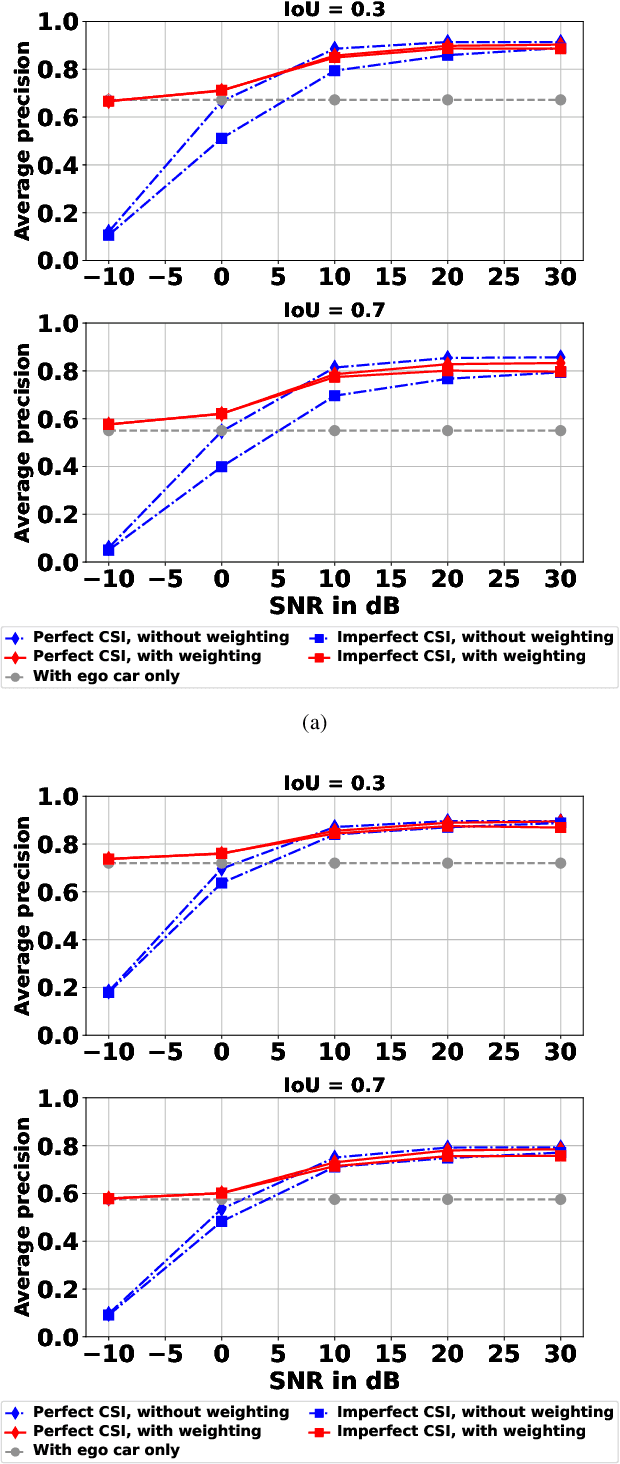
Perception of the driving environment is critical for collision avoidance and route planning to ensure driving safety. Cooperative perception has been widely studied as an effective approach to addressing the shortcomings of single-vehicle perception. However, the practical limitations of vehicle-to-vehicle (V2V) communications have not been adequately investigated. In particular, current cooperative fusion models rely on supervised models and do not address dynamic performance degradation caused by arbitrary channel impairments. In this paper, a self-supervised adaptive weighting model is proposed for intermediate fusion to mitigate the adverse effects of channel distortion. The performance of cooperative perception is investigated in different system settings. Rician fading and imperfect channel state information (CSI) are also considered. Numerical results demonstrate that the proposed adaptive weighting algorithm significantly outperforms the benchmarks without weighting. Visualization examples validate that the proposed weighting algorithm can flexibly adapt to various channel conditions. Moreover, the adaptive weighting algorithm demonstrates good generalization to untrained channels and test datasets from different domains.
Cooperative Perception with Learning-Based V2V communications
Nov 17, 2023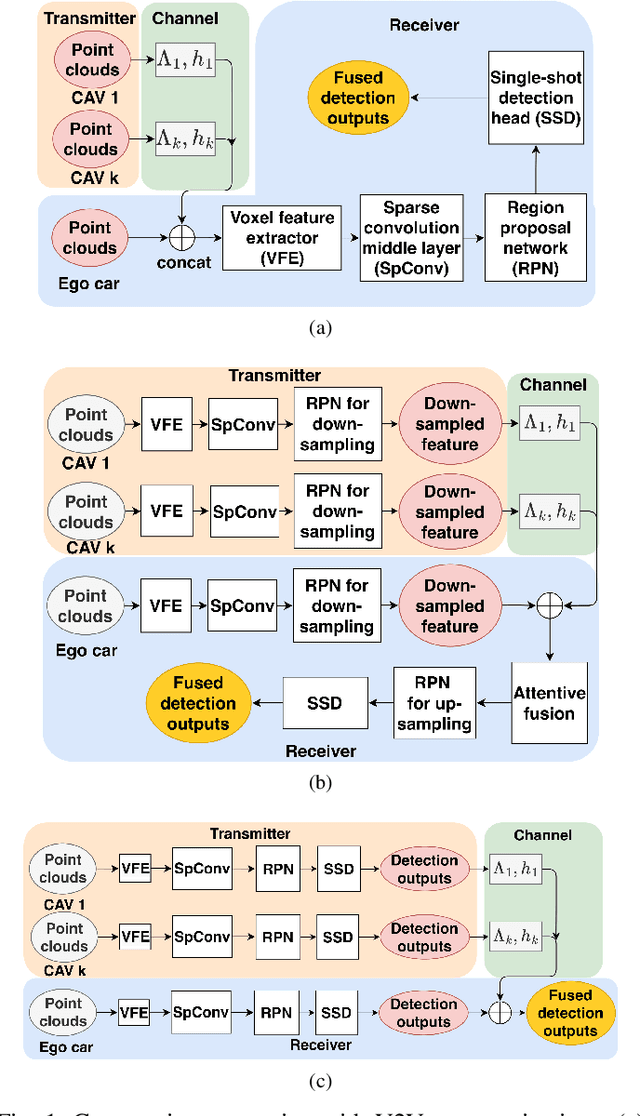
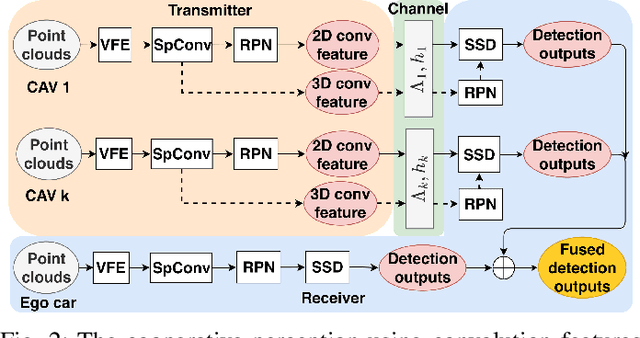
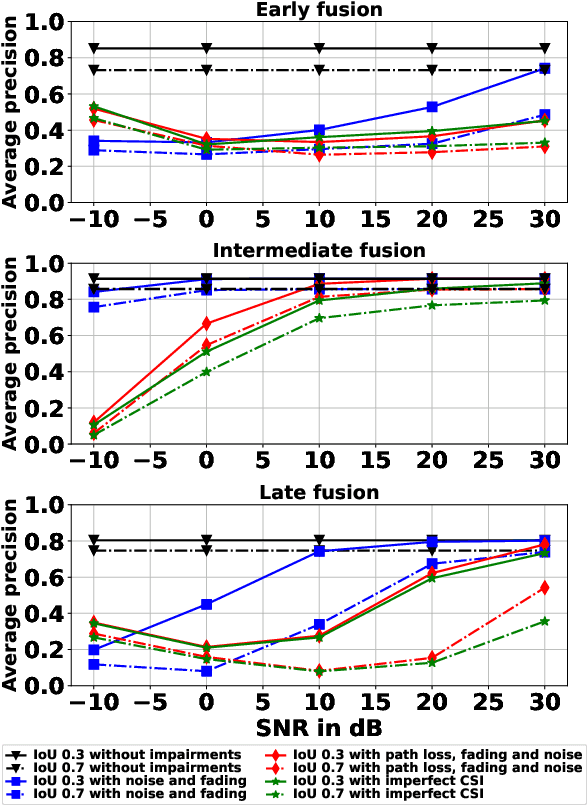
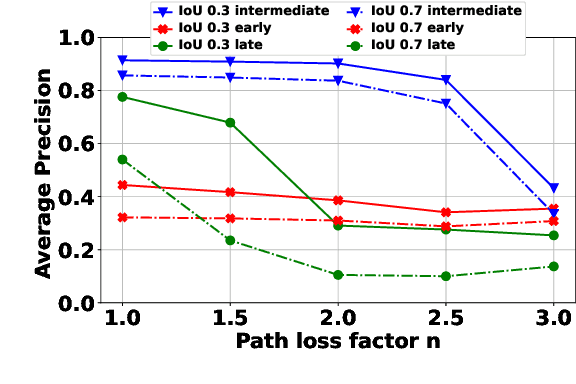
Cooperative perception has been widely used in autonomous driving to alleviate the inherent limitation of single automated vehicle perception. To enable cooperation, vehicle-to-vehicle (V2V) communication plays an indispensable role. This work analyzes the performance of cooperative perception accounting for communications channel impairments. Different fusion methods and channel impairments are evaluated. A new late fusion scheme is proposed to leverage the robustness of intermediate features. In order to compress the data size incurred by cooperation, a convolution neural network-based autoencoder is adopted. Numerical results demonstrate that intermediate fusion is more robust to channel impairments than early fusion and late fusion, when the SNR is greater than 0 dB. Also, the proposed fusion scheme outperforms the conventional late fusion using detection outputs, and autoencoder provides a good compromise between detection accuracy and bandwidth usage.