 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParameter-Efficient Fine-Tuning in Large Models: A Survey of Methodologies
Oct 24, 2024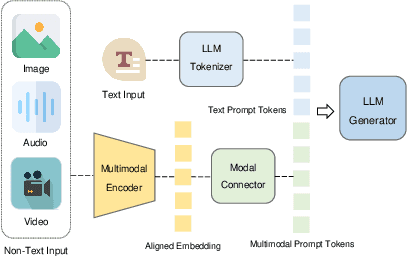
The large models, as predicted by scaling raw forecasts, have made groundbreaking progress in many fields, particularly in natural language generation tasks, where they have approached or even surpassed human levels. However, the unprecedented scale of their parameters brings significant computational and storage costs. These large models require substantial computational resources and GPU memory to operate. When adapting large models to specific downstream tasks, their massive parameter scale poses a significant challenge in fine-tuning on hardware platforms with limited computational power and GPU memory. To address this issue, Parameter-Efficient Fine-Tuning (PEFT) offers a practical solution by efficiently adjusting the parameters of large pre-trained models to suit various downstream tasks. Specifically, PEFT adjusts the parameters of pre-trained large models to adapt to specific tasks or domains, minimizing the introduction of additional parameters and the computational resources required. This review mainly introduces the preliminary knowledge of PEFT, the core ideas and principles of various PEFT algorithms, the applications of PEFT, and potential future research directions. By reading this review, we believe that interested parties can quickly grasp the PEFT methodology, thereby accelerating its development and innovation.
Primary-Auxiliary Model Scheduling Based Estimation of the Vertical Wheel Force in a Full Vehicle System
Jul 24, 2021



In this work, we study estimation problems in nonlinear mechanical systems subject to non-stationary and unknown excitation, which are common and critical problems in design and health management of mechanical systems. A primary-auxiliary model scheduling procedure based on time-domain transmissibilities is proposed and performed under switching linear dynamics: In addition to constructing a primary transmissibility family from the pseudo-inputs to the output during the offline stage, an auxiliary transmissibility family is constructed by further decomposing the pseudo-input vector into two parts. The auxiliary family enables to determine the unknown working condition at which the system is currently running at, and then an appropriate transmissibility from the primary transmissibility family for estimating the unknown output can be selected during the online estimation stage. As a result, the proposed approach offers a generalizable and explainable solution to the signal estimation problems in nonlinear mechanical systems in the context of switching linear dynamics with unknown inputs. A real-world application to the estimation of the vertical wheel force in a full vehicle system are, respectively, conducted to demonstrate the effectiveness of the proposed method. During the vehicle design phase, the vertical wheel force is the most important one among Wheel Center Loads (WCLs), and it is often measured directly with expensive, intrusive, and hard-to-install measurement devices during full vehicle testing campaigns. Meanwhile, the estimation problem of the vertical wheel force has not been solved well and is still of great interest. The experimental results show good performances of the proposed method in the sense of estimation accuracy for estimating the vertical wheel force.