 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStereo Camera Visual SLAM with Hierarchical Masking and Motion-state Classification at Outdoor Construction Sites Containing Large Dynamic Objects
Jan 17, 2021
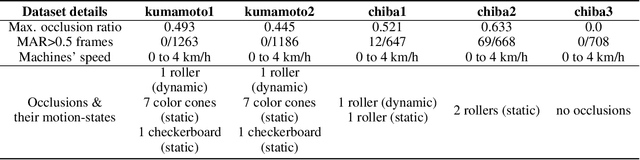

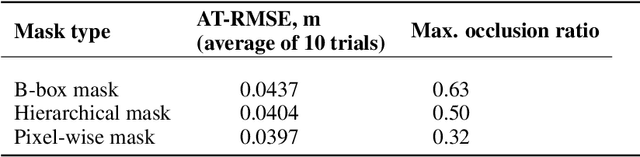
At modern construction sites, utilizing GNSS (Global Navigation Satellite System) to measure the real-time location and orientation (i.e. pose) of construction machines and navigate them is very common. However, GNSS is not always available. Replacing GNSS with on-board cameras and visual simultaneous localization and mapping (visual SLAM) to navigate the machines is a cost-effective solution. Nevertheless, at construction sites, multiple construction machines will usually work together and side-by-side, causing large dynamic occlusions in the cameras' view. Standard visual SLAM cannot handle large dynamic occlusions well. In this work, we propose a motion segmentation method to efficiently extract static parts from crowded dynamic scenes to enable robust tracking of camera ego-motion. Our method utilizes semantic information combined with object-level geometric constraints to quickly detect the static parts of the scene. Then, we perform a two-step coarse-to-fine ego-motion tracking with reference to the static parts. This leads to a novel dynamic visual SLAM formation. We test our proposals through a real implementation based on ORB-SLAM2, and datasets we collected from real construction sites. The results show that when standard visual SLAM fails, our method can still retain accurate camera ego-motion tracking in real-time. Comparing to state-of-the-art dynamic visual SLAM methods, ours shows outstanding efficiency and competitive result trajectory accuracy.
* This is an Accepted Manuscript of an article published by Taylor & Francis in Advanced Robotics on Jan. 11th, 2021, available online: https://www.tandfonline.com/doi/full/10.1080/01691864.2020.1869586 [Article DOI:10.1080/01691864.2020.1869586]