 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGP-net: Grasp Proposal for Mobile Manipulators
Sep 21, 2022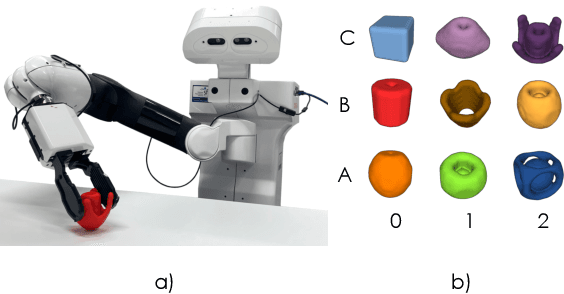

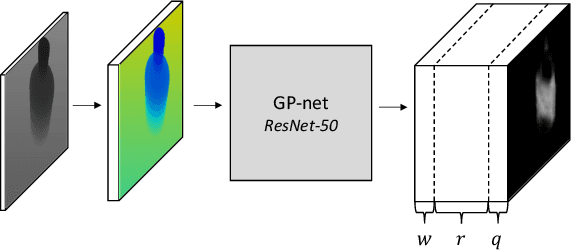
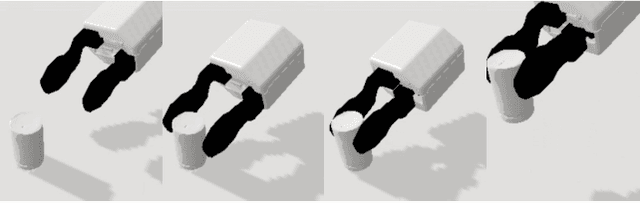
We present the Grasp Proposal Network (GP-net), a Convolutional Neural Network model which can generate 6-DOF grasps for mobile manipulators. To train GP-net, we synthetically generate a dataset containing depth-images and ground-truth grasp information for more than 1400 objects. In real-world experiments we use the EGAD! grasping benchmark to evaluate GP-net against two commonly used algorithms, the Volumetric Grasping Network (VGN) and the Grasp Pose Detection package (GPD), on a PAL TIAGo mobile manipulator. GP-net achieves grasp success rates of 82.2% compared to 57.8% for VGN and 63.3% with GPD. In contrast to the state-of-the-art methods in robotic grasping, GP-net can be used out-of-the-box for grasping objects with mobile manipulators without limiting the workspace, requiring table segmentation or needing a high-end GPU. To encourage the usage of GP-net, we provide a ROS package along with our code and pre-trained models at https://aucoroboticsmu.github.io/GP-net/.
FisheyeSuperPoint: Keypoint Detection and Description Network for Fisheye Images
Feb 27, 2021



Keypoint detection and description is a commonly used building block in computer vision systems particularly for robotics and autonomous driving. Recently CNN based approaches have surpassed classical methods in a number of perception tasks. However, the majority of techniques to date have focused on standard cameras with little consideration given to fisheye cameras which are commonly used in autonomous driving. In this paper, we propose a novel training and evaluation pipeline for fisheye images. We make use of SuperPoint as our baseline which is a self-supervised keypoint detector and descriptor that has achieved state-of-the-art results on homography estimation. We introduce a fisheye adaptation pipeline to enable training on undistorted fisheye images. We evaluate the performance on the HPatches benchmark, and, by introducing a fisheye based evaluation methods for detection repeatability and descriptor matching correctness on the Oxford RobotCar datasets.