 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Uncertain Single-View Depths in Endoscopies
Dec 16, 2021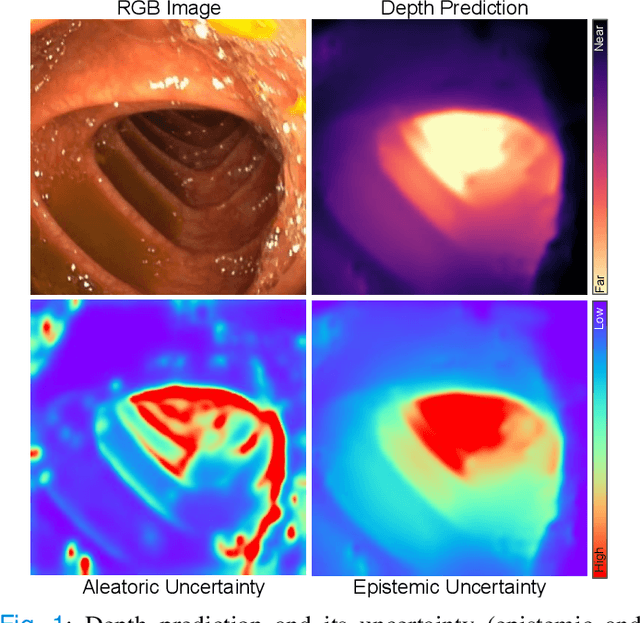
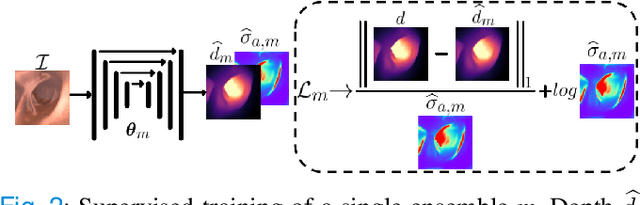
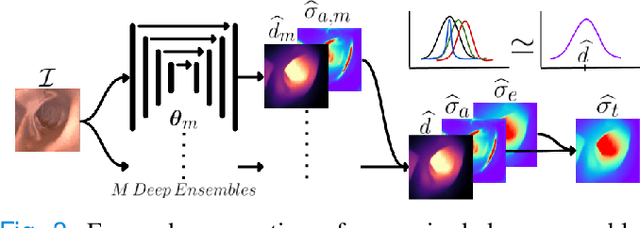
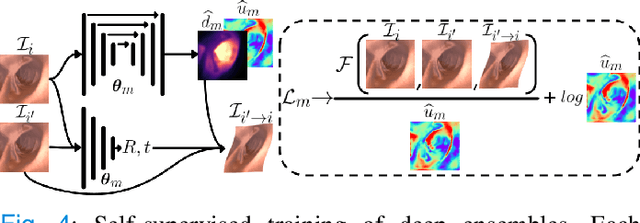
Estimating depth from endoscopic images is a pre-requisite for a wide set of AI-assisted technologies, namely accurate localization, measurement of tumors, or identification of non-inspected areas. As the domain specificity of colonoscopies -- a deformable low-texture environment with fluids, poor lighting conditions and abrupt sensor motions -- pose challenges to multi-view approaches, single-view depth learning stands out as a promising line of research. In this paper, we explore for the first time Bayesian deep networks for single-view depth estimation in colonoscopies. Their uncertainty quantification offers great potential for such a critical application area. Our specific contribution is two-fold: 1) an exhaustive analysis of Bayesian deep networks for depth estimation in three different datasets, highlighting challenges and conclusions regarding synthetic-to-real domain changes and supervised vs. self-supervised methods; and 2) a novel teacher-student approach to deep depth learning that takes into account the teacher uncertainty.
Bayesian Deep Networks for Supervised Single-View Depth Learning
Apr 29, 2021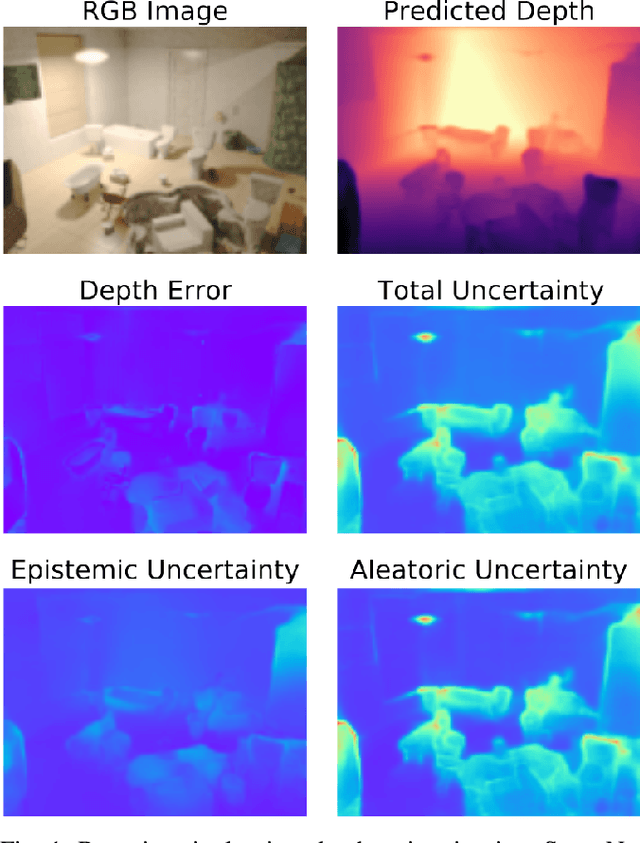
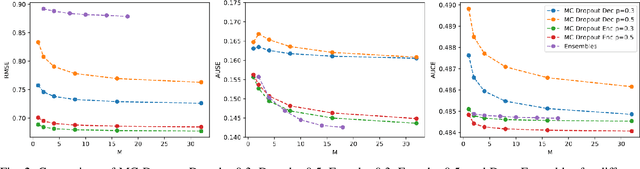
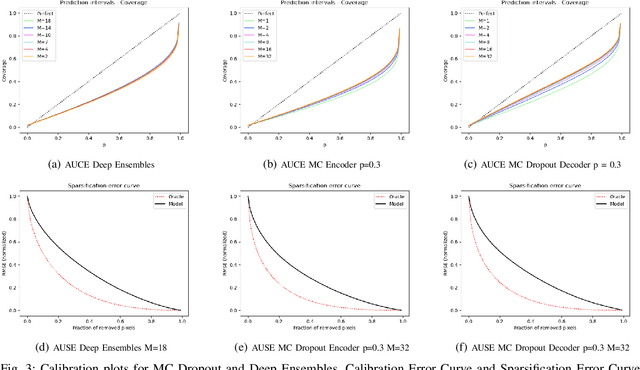
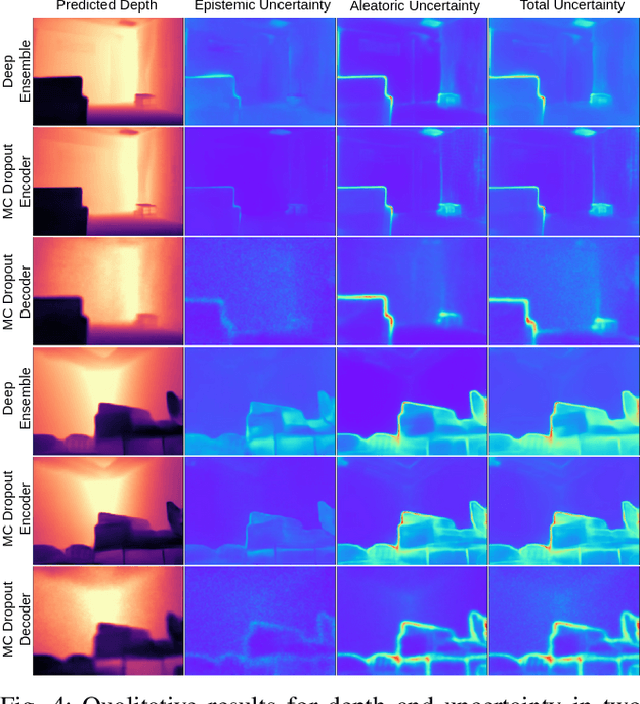
Uncertainty quantification is a key aspect in robotic perception, as overconfident or point estimators can lead to collisions and damages to the environment and the robot. In this paper, we evaluate scalable approaches to uncertainty quantification in single-view supervised depth learning, specifically MC dropout and deep ensembles. For MC dropout, in particular, we explore the effect of the dropout at different levels in the architecture. We demonstrate that adding dropout in the encoder leads to better results than adding it in the decoder, the latest being the usual approach in the literature for similar problems. We also propose the use of depth uncertainty in the application of pseudo-RGBD ICP and demonstrate its potential for improving the accuracy in such a task.