 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey on Human-aware Robot Navigation
Jun 22, 2021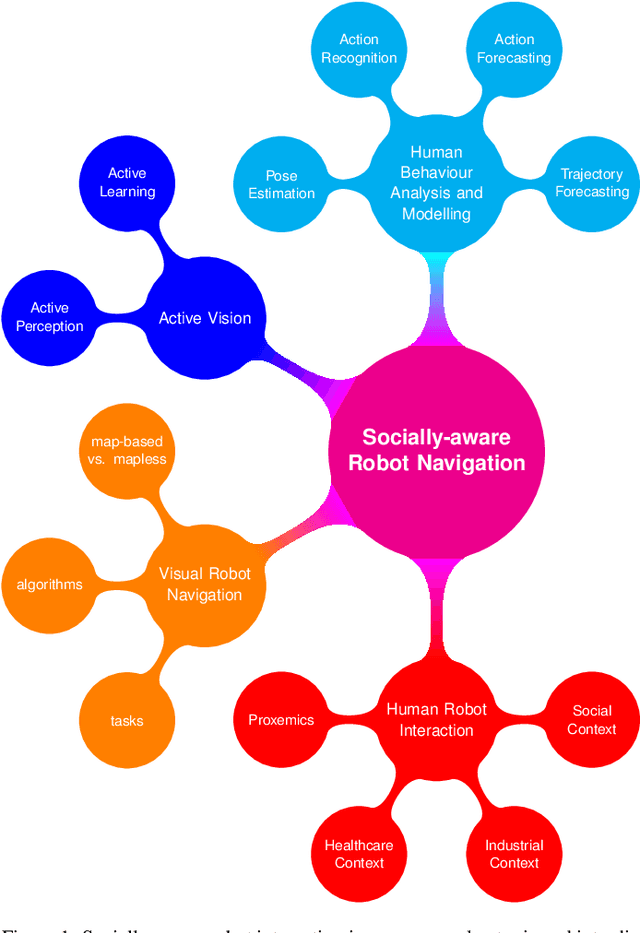
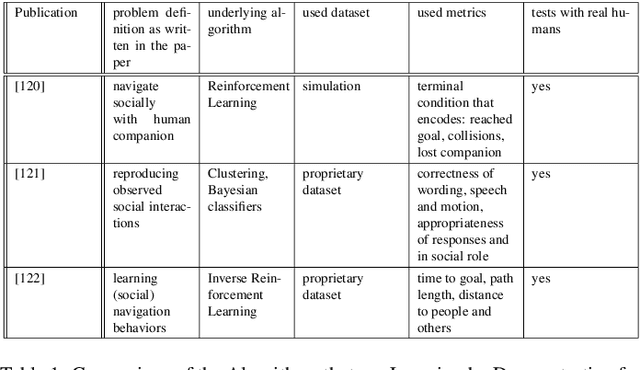

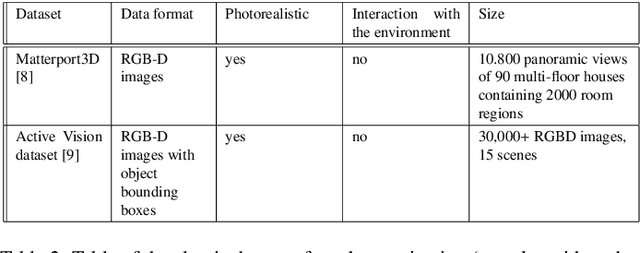
Intelligent systems are increasingly part of our everyday lives and have been integrated seamlessly to the point where it is difficult to imagine a world without them. Physical manifestations of those systems on the other hand, in the form of embodied agents or robots, have so far been used only for specific applications and are often limited to functional roles (e.g. in the industry, entertainment and military fields). Given the current growth and innovation in the research communities concerned with the topics of robot navigation, human-robot-interaction and human activity recognition, it seems like this might soon change. Robots are increasingly easy to obtain and use and the acceptance of them in general is growing. However, the design of a socially compliant robot that can function as a companion needs to take various areas of research into account. This paper is concerned with the navigation aspect of a socially-compliant robot and provides a survey of existing solutions for the relevant areas of research as well as an outlook on possible future directions.
Automatic Analysis of Sewer Pipes Based on Unrolled Monocular Fisheye Images
Dec 11, 2019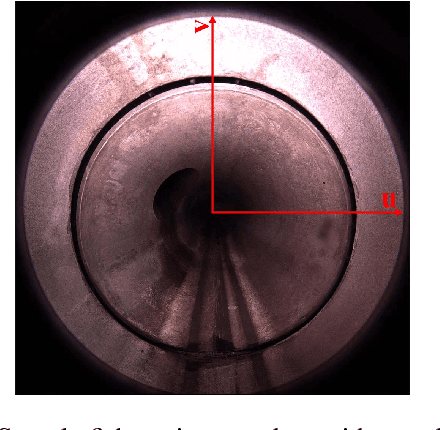
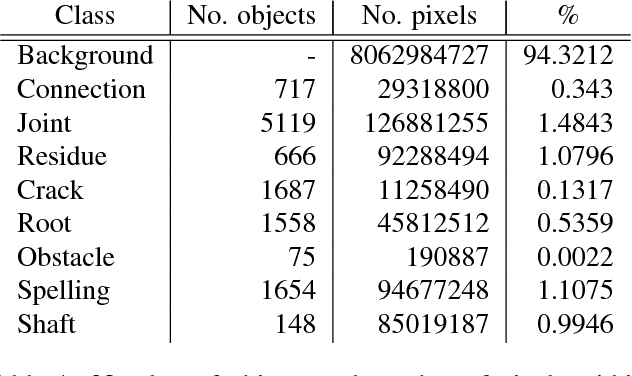
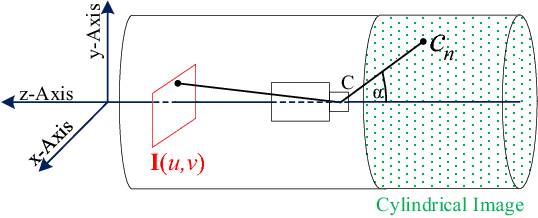
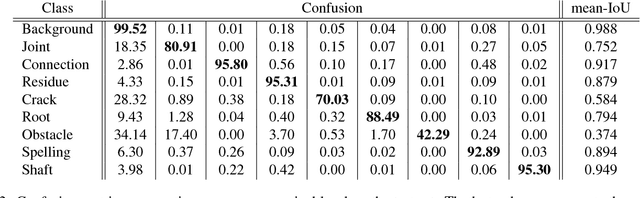
The task of detecting and classifying damages in sewer pipes offers an important application area for computer vision algorithms. This paper describes a system, which is capable of accomplishing this task solely based on low quality and severely compressed fisheye images from a pipe inspection robot. Relying on robust image features, we estimate camera poses, model the image lighting, and exploit this information to generate high quality cylindrical unwraps of the pipes' surfaces.Based on the generated images, we apply semantic labeling based on deep convolutional neural networks to detect and classify defects as well as structural elements.
* Published in: 2018 IEEE Winter Conference on Applications of Computer Vision (WACV)