 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImLiDAR: Cross-Sensor Dynamic Message Propagation Network for 3D Object Detection
Nov 17, 2022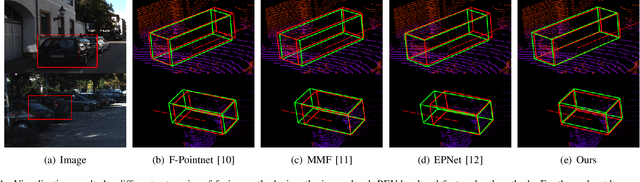
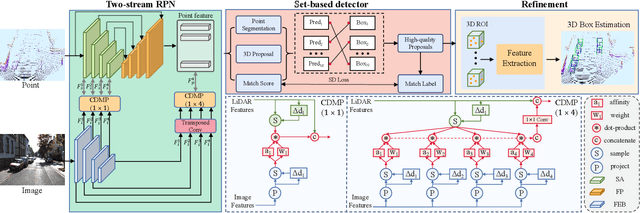
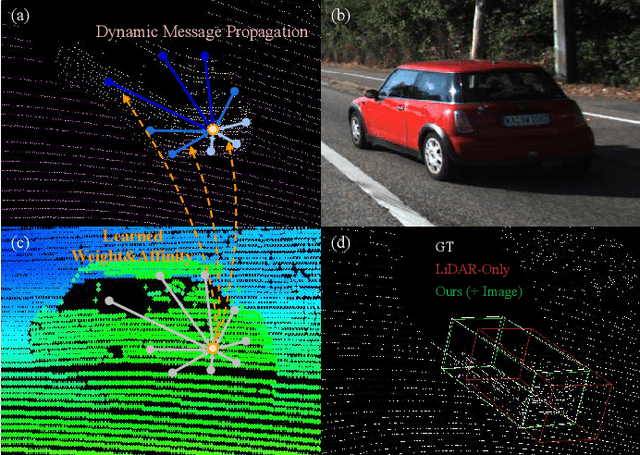
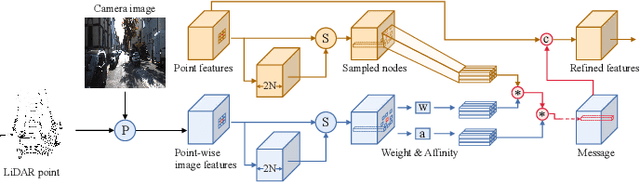
LiDAR and camera, as two different sensors, supply geometric (point clouds) and semantic (RGB images) information of 3D scenes. However, it is still challenging for existing methods to fuse data from the two cross sensors, making them complementary for quality 3D object detection (3OD). We propose ImLiDAR, a new 3OD paradigm to narrow the cross-sensor discrepancies by progressively fusing the multi-scale features of camera Images and LiDAR point clouds. ImLiDAR enables to provide the detection head with cross-sensor yet robustly fused features. To achieve this, two core designs exist in ImLiDAR. First, we propose a cross-sensor dynamic message propagation module to combine the best of the multi-scale image and point features. Second, we raise a direct set prediction problem that allows designing an effective set-based detector to tackle the inconsistency of the classification and localization confidences, and the sensitivity of hand-tuned hyperparameters. Besides, the novel set-based detector can be detachable and easily integrated into various detection networks. Comparisons on both the KITTI and SUN-RGBD datasets show clear visual and numerical improvements of our ImLiDAR over twenty-three state-of-the-art 3OD methods.