 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobots as Powerful Allies for the Study of Embodied Cognition from the Bottom Up
Jan 15, 2018A large body of compelling evidence has been accumulated demonstrating that embodiment - the agent's physical setup, including its shape, materials, sensors and actuators - is constitutive for any form of cognition and as a consequence, models of cognition need to be embodied. In contrast to methods from empirical sciences to study cognition, robots can be freely manipulated and virtually all key variables of their embodiment and control programs can be systematically varied. As such, they provide an extremely powerful tool of investigation. We present a robotic bottom-up or developmental approach, focusing on three stages: (a) low-level behaviors like walking and reflexes, (b) learning regularities in sensorimotor spaces, and (c) human-like cognition. We also show that robotic based research is not only a productive path to deepening our understanding of cognition, but that robots can strongly benefit from human-like cognition in order to become more autonomous, robust, resilient, and safe.
Measuring information transfer in a soft robotic arm
Jul 15, 2014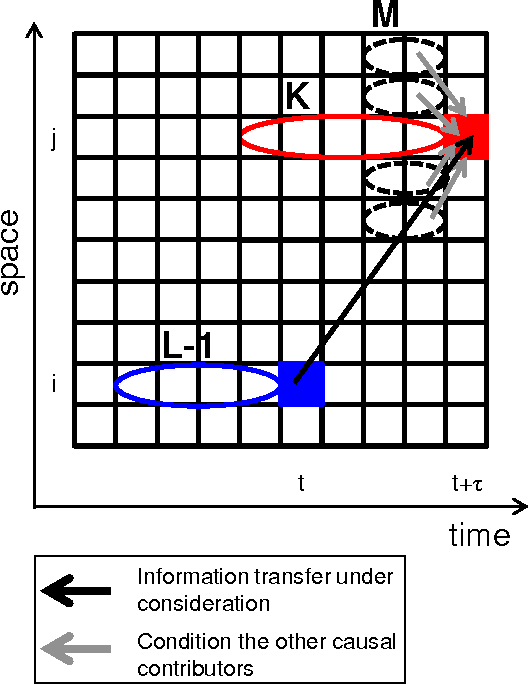
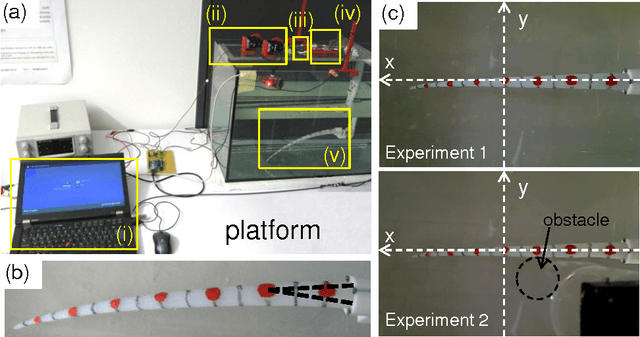
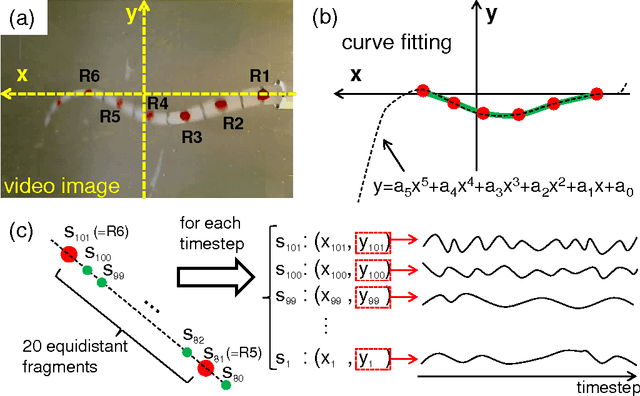
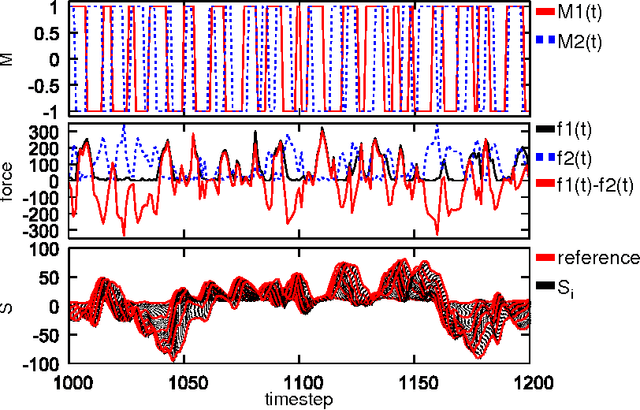
Soft robots can exhibit diverse behaviors with simple types of actuation by partially outsourcing control to the morphological and material properties of their soft bodies, which is made possible by the tight coupling between control, body, and environment. In this paper, we present a method that will quantitatively characterize these diverse spatiotemporal dynamics of a soft body based on the information-theoretic approach. In particular, soft bodies have the ability to propagate the effect of actuation through the entire body, with a certain time delay, due to their elasticity. Our goal is to capture this delayed interaction in a quantitative manner based on a measure called momentary information transfer. We extend this measure to soft robotic applications and demonstrate its power using a physical soft robotic platform inspired by the octopus. Our approach is illustrated in two ways. First, we statistically characterize the delayed actuation propagation through the body as a strength of information transfer. Second, we capture this information propagation directly as local information dynamics. As a result, we show that our approach can successfully characterize the spatiotemporal dynamics of the soft robotic platform, explicitly visualizing how information transfers through the entire body with delays. Further extension scenarios of our approach are discussed for soft robotic applications in general.
The implications of embodiment for behavior and cognition: animal and robotic case studies
Feb 02, 2012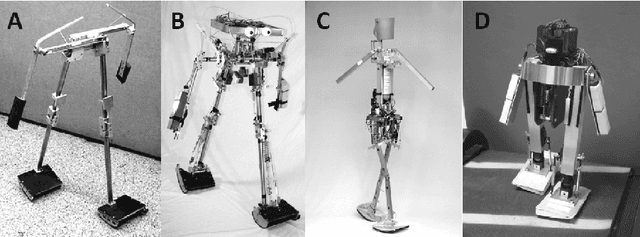
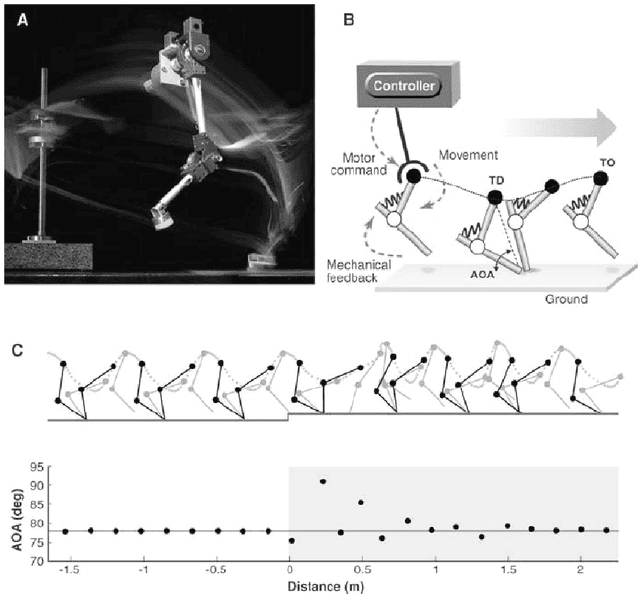
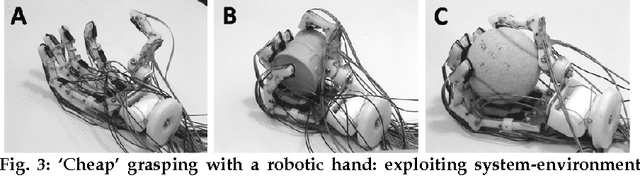
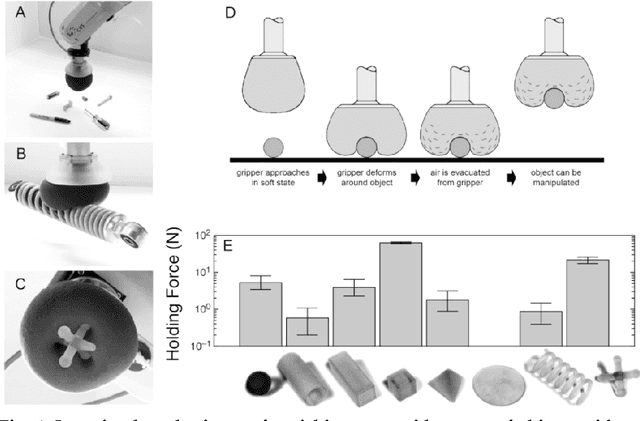
In this paper, we will argue that if we want to understand the function of the brain (or the control in the case of robots), we must understand how the brain is embedded into the physical system, and how the organism interacts with the real world. While embodiment has often been used in its trivial meaning, i.e. 'intelligence requires a body', the concept has deeper and more important implications, concerned with the relation between physical and information (neural, control) processes. A number of case studies are presented to illustrate the concept. These involve animals and robots and are concentrated around locomotion, grasping, and visual perception. A theoretical scheme that can be used to embed the diverse case studies will be presented. Finally, we will establish a link between the low-level sensory-motor processes and cognition. We will present an embodied view on categorization, and propose the concepts of 'body schema' and 'forward models' as a natural extension of the embodied approach toward first representations.