 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe implications of embodiment for behavior and cognition: animal and robotic case studies
Paper and Code
Feb 02, 2012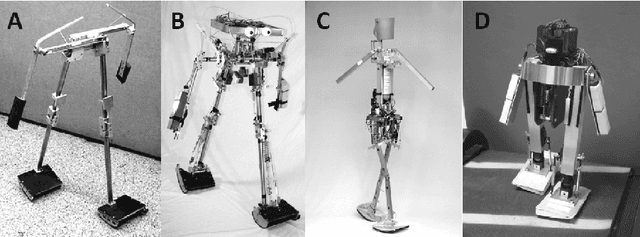
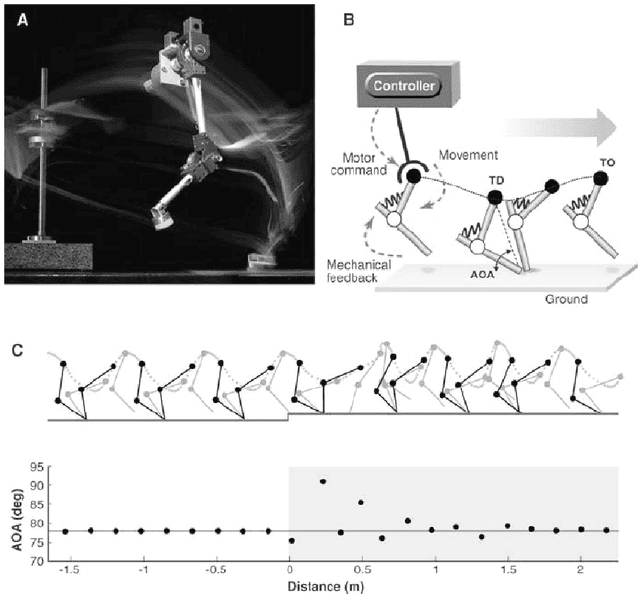
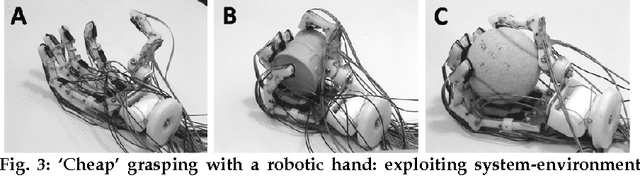
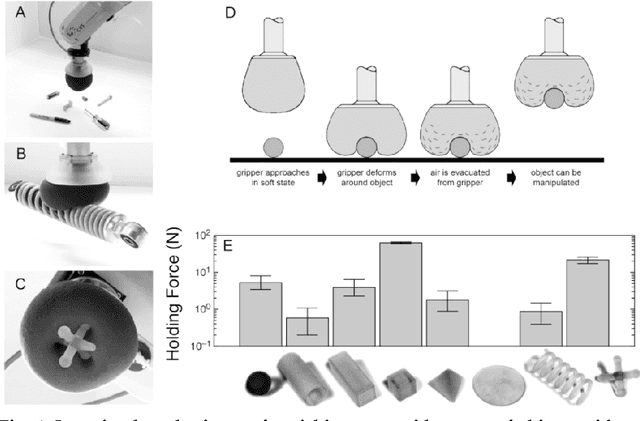
In this paper, we will argue that if we want to understand the function of the brain (or the control in the case of robots), we must understand how the brain is embedded into the physical system, and how the organism interacts with the real world. While embodiment has often been used in its trivial meaning, i.e. 'intelligence requires a body', the concept has deeper and more important implications, concerned with the relation between physical and information (neural, control) processes. A number of case studies are presented to illustrate the concept. These involve animals and robots and are concentrated around locomotion, grasping, and visual perception. A theoretical scheme that can be used to embed the diverse case studies will be presented. Finally, we will establish a link between the low-level sensory-motor processes and cognition. We will present an embodied view on categorization, and propose the concepts of 'body schema' and 'forward models' as a natural extension of the embodied approach toward first representations.