 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChance-Constrained Motion Planning with Event-Triggered Estimation
Oct 13, 2022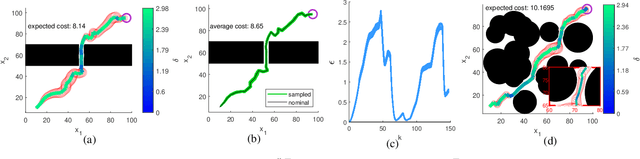
We consider the problem of autonomous navigation using limited information from a remote sensor network. Because the remote sensors are power and bandwidth limited, we use event-triggered (ET) estimation to manage communication costs. We introduce a fast and efficient sampling-based planner which computes motion plans coupled with ET communication strategies that minimize communication costs, while satisfying constraints on the probability of reaching the goal region and the point-wise probability of collision. We derive a novel method for offline propagation of the expected state distribution, and corresponding bounds on this distribution. These bounds are used to evaluate the chance constraints in the algorithm. Case studies establish the validity of our approach, demonstrating fast computation of optimal plans.