 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtended Version: Multi-Robot Motion Planning with Cooperative Localization
Apr 08, 2025We consider the uncertain multi-robot motion planning (MRMP) problem with cooperative localization (CL-MRMP), under both motion and measurement noise, where each robot can act as a sensor for its nearby teammates. We formalize CL-MRMP as a chance-constrained motion planning problem, and propose a safety-guaranteed algorithm that explicitly accounts for robot-robot correlations. Our approach extends a sampling-based planner to solve CL-MRMP while preserving probabilistic completeness. To improve efficiency, we introduce novel biasing techniques. We evaluate our method across diverse benchmarks, demonstrating its effectiveness in generating motion plans, with significant performance gains from biasing strategies.
Chance-Constrained Multi-Robot Motion Planning under Gaussian Uncertainties
Apr 04, 2023



We consider a chance-constrained multi-robot motion planning problem in the presence of Gaussian motion and sensor noise. Our proposed algorithm, CC-K-CBS, leverages the scalability of kinodynamic conflict-based search (K-CBS) in conjunction with the efficiency of the Gaussian belief trees used in the Belief-A framework, and inherits the completeness guarantees of Belief-A's low-level sampling-based planner. We also develop three different methods for robot-robot probabilistic collision checking, which trade off computation with accuracy. Our algorithm generates motion plans driving each robot from its initial state to its goal while accounting for the evolution of its uncertainty with chance-constrained safety guarantees. Benchmarks compare computation time to conservatism of the collision checkers, in addition to characterizing the performance of the planner as a whole. Results show that CC-K-CBS can scale up to 30 robots.
Chance-Constrained Motion Planning with Event-Triggered Estimation
Oct 13, 2022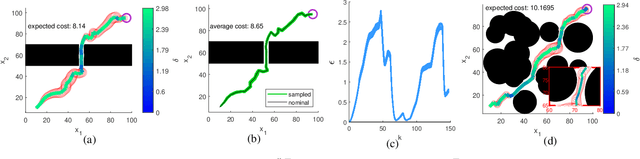
We consider the problem of autonomous navigation using limited information from a remote sensor network. Because the remote sensors are power and bandwidth limited, we use event-triggered (ET) estimation to manage communication costs. We introduce a fast and efficient sampling-based planner which computes motion plans coupled with ET communication strategies that minimize communication costs, while satisfying constraints on the probability of reaching the goal region and the point-wise probability of collision. We derive a novel method for offline propagation of the expected state distribution, and corresponding bounds on this distribution. These bounds are used to evaluate the chance constraints in the algorithm. Case studies establish the validity of our approach, demonstrating fast computation of optimal plans.