 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZeroShotDataAug: Generating and Augmenting Training Data with ChatGPT
Apr 27, 2023In this paper, we investigate the use of data obtained from prompting a large generative language model, ChatGPT, to generate synthetic training data with the aim of augmenting data in low resource scenarios. We show that with appropriate task-specific ChatGPT prompts, we outperform the most popular existing approaches for such data augmentation. Furthermore, we investigate methodologies for evaluating the similarity of the augmented data generated from ChatGPT with the aim of validating and assessing the quality of the data generated.
eBear: An Expressive Bear-Like Robot
Nov 20, 2015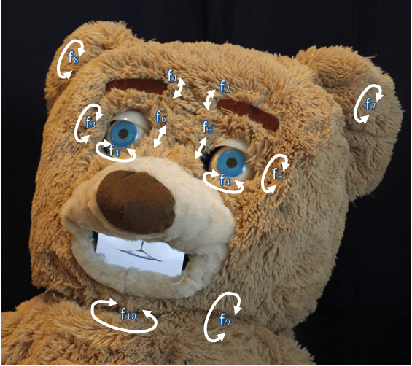
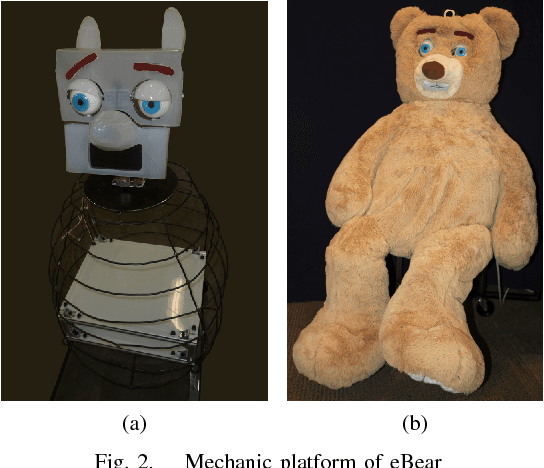
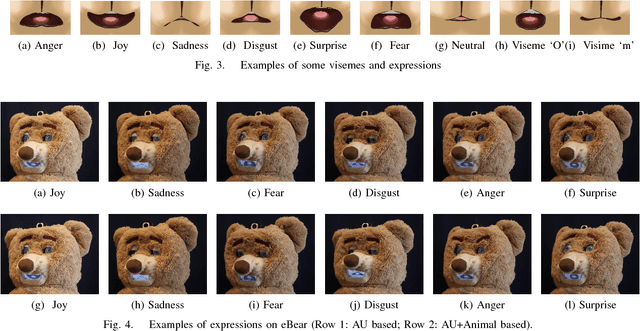
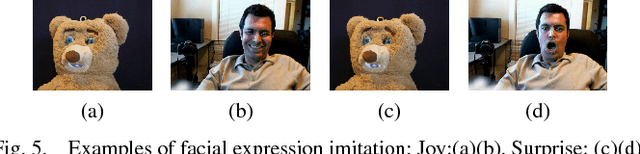
This paper presents an anthropomorphic robotic bear for the exploration of human-robot interaction including verbal and non-verbal communications. This robot is implemented with a hybrid face composed of a mechanical faceplate with 10 DOFs and an LCD-display-equipped mouth. The facial emotions of the bear are designed based on the description of the Facial Action Coding System as well as some animal-like gestures described by Darwin. The mouth movements are realized by synthesizing emotions with speech. User acceptance investigations have been conducted to evaluate the likability of these facial behaviors exhibited by the eBear. Multiple Kernel Learning is proposed to fuse different features for recognizing user's facial expressions. Our experimental results show that the developed Bear-Like robot can perceive basic facial expressions and provide emotive conveyance towards human beings.
MOB-ESP and other Improvements in Probability Estimation
Jul 11, 2012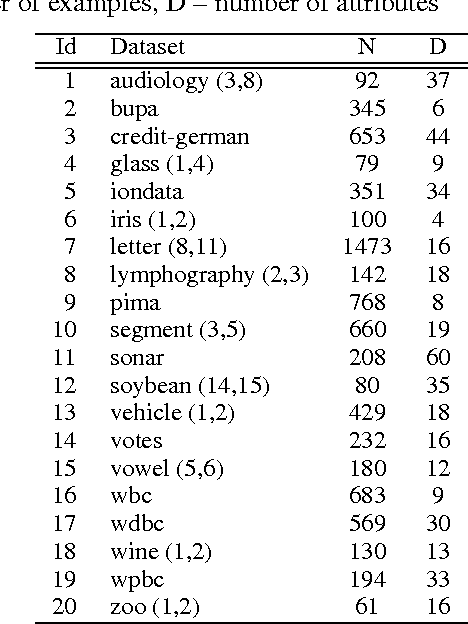

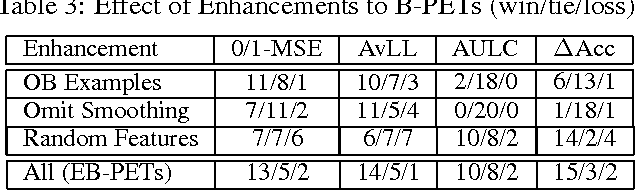
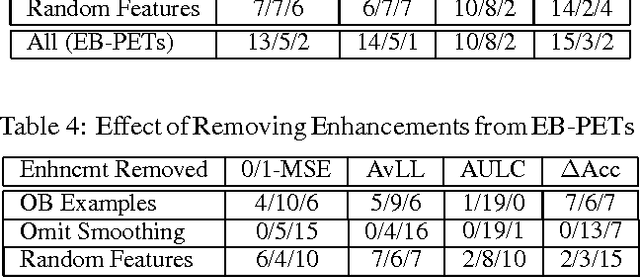
A key prerequisite to optimal reasoning under uncertainty in intelligent systems is to start with good class probability estimates. This paper improves on the current best probability estimation trees (Bagged-PETs) and also presents a new ensemble-based algorithm (MOB-ESP). Comparisons are made using several benchmark datasets and multiple metrics. These experiments show that MOB-ESP outputs significantly more accurate class probabilities than either the baseline BPETs algorithm or the enhanced version presented here (EB-PETs). These results are based on metrics closely associated with the average accuracy of the predictions. MOB-ESP also provides much better probability rankings than B-PETs. The paper further suggests how these estimation techniques can be applied in concert with a broader category of classifiers.