 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocalization and path following for an autonomous e-scooter
May 08, 2025In order to mitigate economical, ecological, and societal challenges in electric scooter (e-scooter) sharing systems, we develop an autonomous e-scooter prototype. Our vision is to design a fully autonomous prototype that can find its way to the next parking spot, high-demand area, or charging station. In this work, we propose a path following solution to enable localization and navigation in an urban environment with a provided path to follow. We design a closed-loop architecture that solves the localization and path following problem while allowing the e-scooter to maintain its balance with a previously developed reaction wheel mechanism. Our approach facilitates state and input constraints, e.g., adhering to the path width, while remaining executable on a Raspberry Pi 5. We demonstrate the efficacy of our approach in a real-world experiment on our prototype.
End-to-end guarantees for indirect data-driven control of bilinear systems with finite stochastic data
Sep 26, 2024



In this paper we propose an end-to-end algorithm for indirect data-driven control for bilinear systems with stability guarantees. We consider the case where the collected i.i.d. data is affected by probabilistic noise with possibly unbounded support and leverage tools from statistical learning theory to derive finite sample identification error bounds. To this end, we solve the bilinear identification problem by solving a set of linear and affine identification problems, by a particular choice of a control input during the data collection phase. We provide a priori as well as data-dependent finite sample identification error bounds on the individual matrices as well as ellipsoidal bounds, both of which are structurally suitable for control. Further, we integrate the structure of the derived identification error bounds in a robust controller design to obtain an exponentially stable closed-loop. By means of an extensive numerical study we showcase the interplay between the controller design and the derived identification error bounds. Moreover, we note appealing connections of our results to indirect data-driven control of general nonlinear systems through Koopman operator theory and discuss how our results may be applied in this setup.
Collision Avoidance Safety Filter for an Autonomous E-Scooter using Ultrasonic Sensors
Mar 22, 2024



In this paper, we propose a collision avoidance safety filter for autonomous electric scooters to enable safe operation of such vehicles in pedestrian areas. In particular, we employ multiple low-cost ultrasonic sensors to detect a wide range of possible obstacles in front of the e-scooter. Based on possibly faulty distance measurements, we design a filter to mitigate measurement noise and missing values as well as a gain-scheduled controller to limit the velocity commanded to the e-scooter when required due to imminent collisions. The proposed controller structure is able to prevent collisions with unknown obstacles by deploying a reduced safe velocity ensuring a sufficiently large safety distance. The collision avoidance approach is designed such that it may be easily deployed in similar applications of general micromobility vehicles. The effectiveness of our proposed safety filter is demonstrated in real-world experiments.
SafEDMD: A certified learning architecture tailored to data-driven control of nonlinear dynamical systems
Feb 05, 2024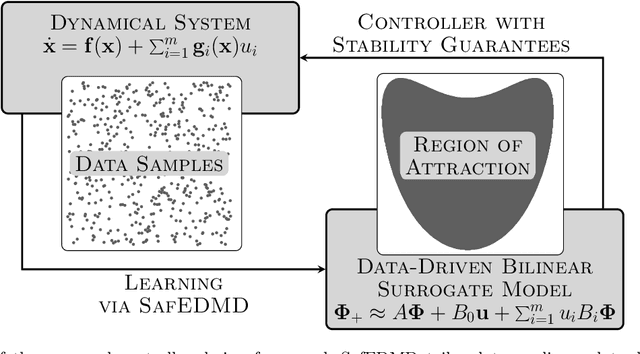
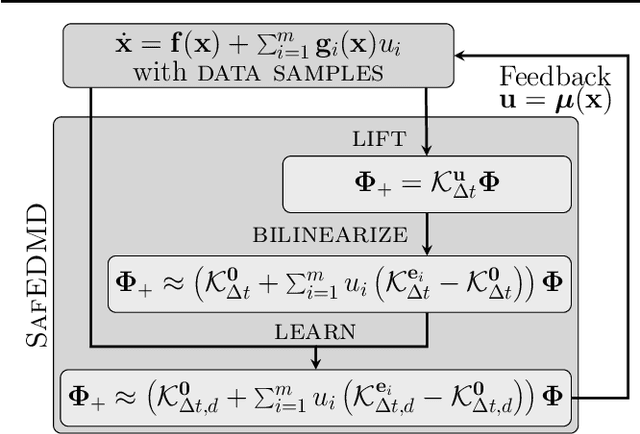
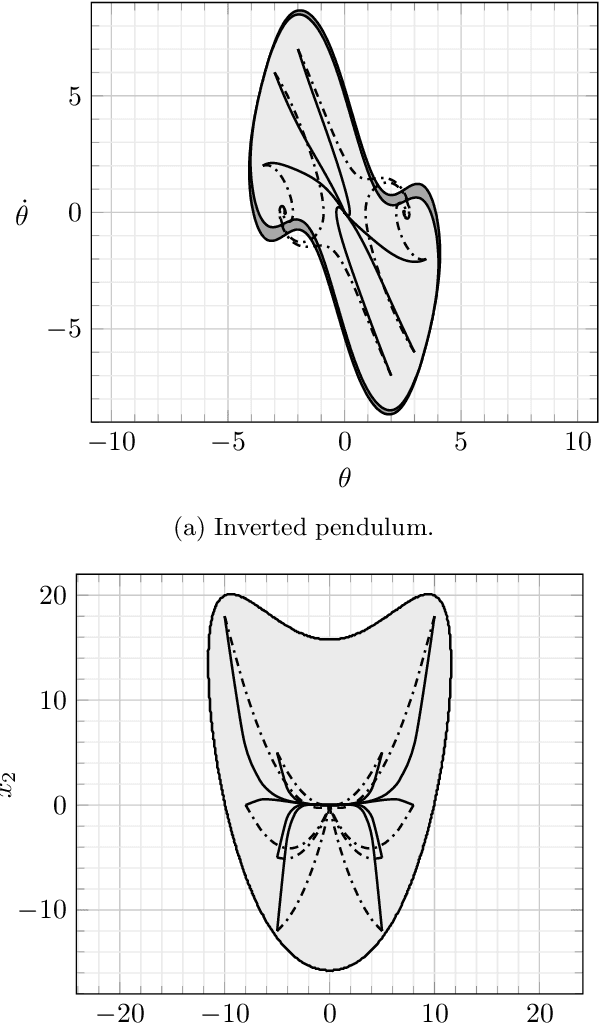
The Koopman operator serves as the theoretical backbone for machine learning of dynamical control systems, where the operator is heuristically approximated by extended dynamic mode decomposition (EDMD). In this paper, we propose Stability- and certificate-oriented EDMD (SafEDMD): a novel EDMD-based learning architecture which comes along with rigorous certificates, resulting in a reliable surrogate model generated in a data-driven fashion. To ensure trustworthiness of SafEDMD, we derive proportional error bounds, which vanish at the origin and are tailored for control tasks, leading to certified controller design based on semi-definite programming. We illustrate the developed machinery by means of several benchmark examples and highlight the advantages over state-of-the-art methods.