 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Joint Motion Model for Human-Like Robot-Human Handover
Aug 28, 2018



In future, robots will be present in everyday life. The development of these supporting robots is a challenge. A fundamental task for assistance robots is to pick up and hand over objects to humans. By interacting with users, soft factors such as predictability, safety and reliability become important factors for development. Previous works show that collaboration with robots is more acceptable when robots behave and move human-like. In this paper, we present a motion model based on the motion profiles of individual joints. These motion profiles are based on observations and measurements of joint movements in human-human handover. We implemented this joint motion model (JMM) on a humanoid and a non-humanoidal industrial robot to show the movements to subjects. Particular attention was paid to the recognizability and human similarity of the movements. The results show that people are able to recognize human-like movements and perceive the movements of the JMM as more human-like compared to a traditional model. Furthermore, it turns out that the differences between a linear joint space trajectory and JMM are more noticeable in an industrial robot than in a humanoid robot.
The Power of Color: A Study on the Effective Use of Colored Light in Human-Robot Interaction
Feb 21, 2018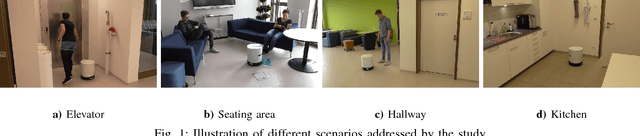
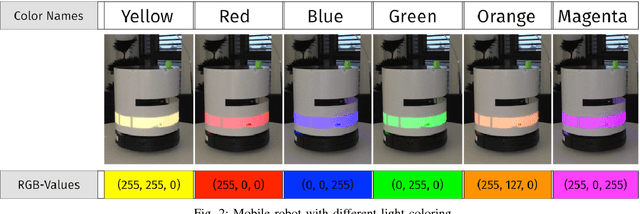
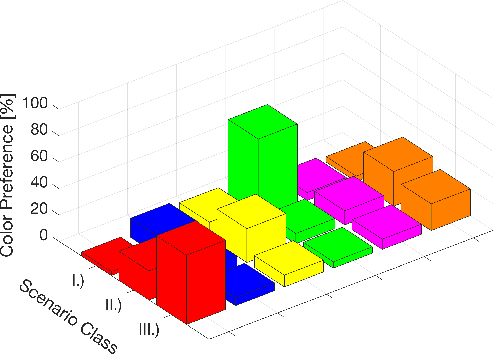
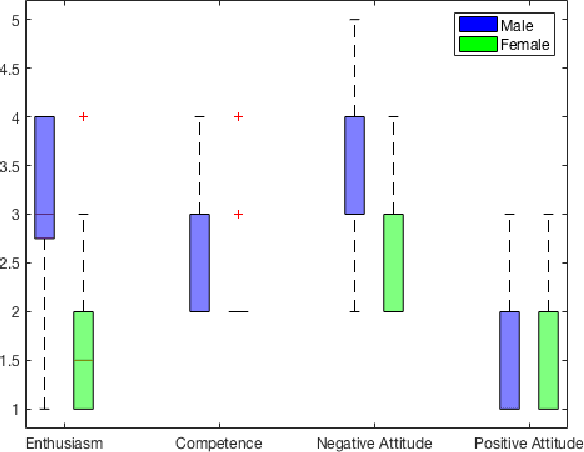
In times of more and more complex interaction techniques, we point out the powerfulness of colored light as a simple and cheap feedback mechanism. Since it is visible over a distance and does not interfere with other modalities, it is especially interesting for mobile robots. In an online survey, we asked 56 participants to choose the most appropriate colors for scenarios that were presented in the form of videos. In these scenarios a mobile robot accomplished tasks, in some with success, in others it failed because the task is not feasible, in others it stopped because it waited for help. We analyze in what way the color preferences differ between these three categories. The results show a connection between colors and meanings and that it depends on the participants' technical affinity, experience with robots and gender how clear the color preference is for a certain category. Finally, we found out that the participants' favorite color is not related to color preferences.
A Framework for Interactive Teaching of Virtual Borders to Mobile Robots
Feb 16, 2017



The increasing number of robots in home environments leads to an emerging coexistence between humans and robots. Robots undertake common tasks and support the residents in their everyday life. People appreciate the presence of robots in their environment as long as they keep the control over them. One important aspect is the control of a robot's workspace. Therefore, we introduce virtual borders to precisely and flexibly define the workspace of mobile robots. First, we propose a novel framework that allows a person to interactively restrict a mobile robot's workspace. To show the validity of this framework, a concrete implementation based on visual markers is implemented. Afterwards, the mobile robot is capable of performing its tasks while respecting the new virtual borders. The approach is accurate, flexible and less time consuming than explicit robot programming. Hence, even non-experts are able to teach virtual borders to their robots which is especially interesting in domains like vacuuming or service robots in home environments.