 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGDPR-Compliant Person Recognition in Industrial Environments Using MEMS-LiDAR and Hybrid Data
Feb 02, 2026The reliable detection of unauthorized individuals in safety-critical industrial indoor spaces is crucial to avoid plant shutdowns, property damage, and personal hazards. Conventional vision-based methods that use deep-learning approaches for person recognition provide image information but are sensitive to lighting and visibility conditions and often violate privacy regulations, such as the General Data Protection Regulation (GDPR) in the European Union. Typically, detection systems based on deep learning require annotated data for training. Collecting and annotating such data, however, is highly time-consuming and due to manual treatments not necessarily error free. Therefore, this paper presents a privacy-compliant approach based on Micro-Electro-Mechanical Systems LiDAR (MEMS-LiDAR), which exclusively captures anonymized 3D point clouds and avoids personal identification features. To compensate for the large amount of time required to record real LiDAR data and for post-processing and annotation, real recordings are augmented with synthetically generated scenes from the CARLA simulation framework. The results demonstrate that the hybrid data improves the average precision by 44 percentage points compared to a model trained exclusively with real data while reducing the manual annotation effort by 50 %. Thus, the proposed approach provides a scalable, cost-efficient alternative to purely real-data-based methods and systematically shows how synthetic LiDAR data can combine high performance in person detection with GDPR compliance in an industrial environment.
Improving Supervised Machine Learning Performance in Optical Quality Control via Generative AI for Dataset Expansion
Jan 30, 2026Supervised machine learning algorithms play a crucial role in optical quality control within industrial production. These approaches require representative datasets for effective model training. However, while non-defective components are frequent, defective parts are rare in production, resulting in highly imbalanced datasets that adversely impact model performance. Existing strategies to address this challenge, such as specialized loss functions or traditional data augmentation techniques, have limitations, including the need for careful hyperparameter tuning or the alteration of only simple image features. Therefore, this work explores the potential of generative artificial intelligence (GenAI) as an alternative method for expanding limited datasets and enhancing supervised machine learning performance. Specifically, we investigate Stable Diffusion and CycleGAN as image generation models, focusing on the segmentation of combine harvester components in thermal images for subsequent defect detection. Our results demonstrate that dataset expansion using Stable Diffusion yields the most significant improvement, enhancing segmentation performance by 4.6 %, resulting in a Mean Intersection over Union (Mean IoU) of 84.6 %.
This Far, No Further: Introducing Virtual Borders to Mobile Robots Using a Laser Pointer
Mar 04, 2019



We address the problem of controlling the workspace of a 3-DoF mobile robot. In a human-robot shared space, robots should navigate in a human-acceptable way according to the users' demands. For this purpose, we employ virtual borders, that are non-physical borders, to allow a user the restriction of the robot's workspace. To this end, we propose an interaction method based on a laser pointer to intuitively define virtual borders. This interaction method uses a previously developed framework based on robot guidance to change the robot's navigational behavior. Furthermore, we extend this framework to increase the flexibility by considering different types of virtual borders, i.e. polygons and curves separating an area. We evaluated our method with 15 non-expert users concerning correctness, accuracy and teaching time. The experimental results revealed a high accuracy and linear teaching time with respect to the border length while correctly incorporating the borders into the robot's navigational map. Finally, our user study showed that non-expert users can employ our interaction method.
Virtual Border Teaching Using a Network Robot System
Feb 19, 2019



Virtual borders are employed to allow users the flexible and interactive definition of their mobile robots' workspaces and to ensure a socially aware navigation in human-centered environments. They have been successfully defined using methods from human-robot interaction where a user directly interacts with the robot. However, since we recently witness an emergence of network robot systems (NRS) enhancing the perceptual and interaction abilities of a robot, we investigate the effect of such a NRS on the teaching of virtual borders and answer the question if an intelligent environment can improve the teaching process of virtual borders. For this purpose, we propose an interaction method based on a NRS and laser pointer as interaction device. This interaction method comprises an architecture that integrates robots into intelligent environments with the purpose of supporting the teaching process in terms of interaction and feedback, the cooperation between stationary and mobile cameras to perceive laser spots and an algorithm allowing the extraction of virtual borders from multiple camera observations. Our experimental results acquired from 15 participants' performances show that our system is equally successful and accurate while featuring a significant lower teaching time and a higher user experience compared to an approach without support of a NRS.
Virtual Borders: Accurate Definition of a Mobile Robot's Workspace Using Augmented Reality
Oct 08, 2018



We address the problem of interactively controlling the workspace of a mobile robot to ensure a human-aware navigation. This is especially of relevance for non-expert users living in human-robot shared spaces, e.g. home environments, since they want to keep the control of their mobile robots, such as vacuum cleaning or companion robots. Therefore, we introduce virtual borders that are respected by a robot while performing its tasks. For this purpose, we employ a RGB-D Google Tango tablet as human-robot interface in combination with an augmented reality application to flexibly define virtual borders. We evaluated our system with 15 non-expert users concerning accuracy, teaching time and correctness and compared the results with other baseline methods based on visual markers and a laser pointer. The experimental results show that our method features an equally high accuracy while reducing the teaching time significantly compared to the baseline methods. This holds for different border lengths, shapes and variations in the teaching process. Finally, we demonstrated the correctness of the approach, i.e. the mobile robot changes its navigational behavior according to the user-defined virtual borders.
The Power of Color: A Study on the Effective Use of Colored Light in Human-Robot Interaction
Feb 21, 2018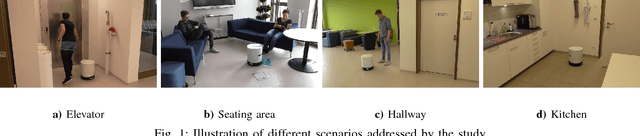
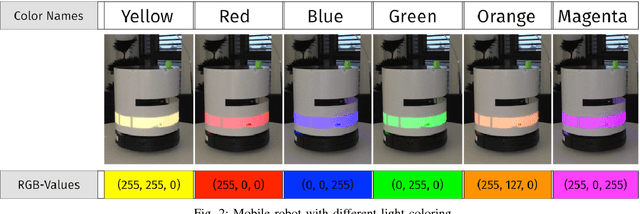
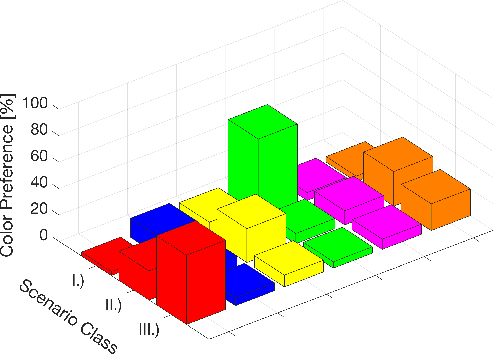
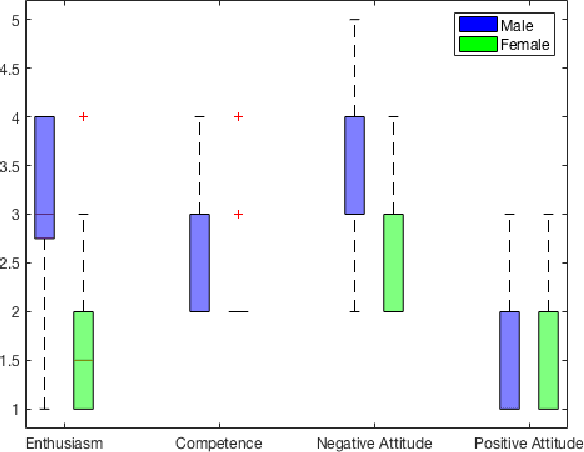
In times of more and more complex interaction techniques, we point out the powerfulness of colored light as a simple and cheap feedback mechanism. Since it is visible over a distance and does not interfere with other modalities, it is especially interesting for mobile robots. In an online survey, we asked 56 participants to choose the most appropriate colors for scenarios that were presented in the form of videos. In these scenarios a mobile robot accomplished tasks, in some with success, in others it failed because the task is not feasible, in others it stopped because it waited for help. We analyze in what way the color preferences differ between these three categories. The results show a connection between colors and meanings and that it depends on the participants' technical affinity, experience with robots and gender how clear the color preference is for a certain category. Finally, we found out that the participants' favorite color is not related to color preferences.
A Framework for Interactive Teaching of Virtual Borders to Mobile Robots
Feb 16, 2017



The increasing number of robots in home environments leads to an emerging coexistence between humans and robots. Robots undertake common tasks and support the residents in their everyday life. People appreciate the presence of robots in their environment as long as they keep the control over them. One important aspect is the control of a robot's workspace. Therefore, we introduce virtual borders to precisely and flexibly define the workspace of mobile robots. First, we propose a novel framework that allows a person to interactively restrict a mobile robot's workspace. To show the validity of this framework, a concrete implementation based on visual markers is implemented. Afterwards, the mobile robot is capable of performing its tasks while respecting the new virtual borders. The approach is accurate, flexible and less time consuming than explicit robot programming. Hence, even non-experts are able to teach virtual borders to their robots which is especially interesting in domains like vacuuming or service robots in home environments.