 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Power of Color: A Study on the Effective Use of Colored Light in Human-Robot Interaction
Feb 21, 2018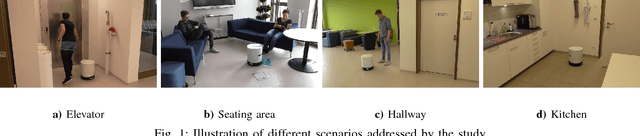
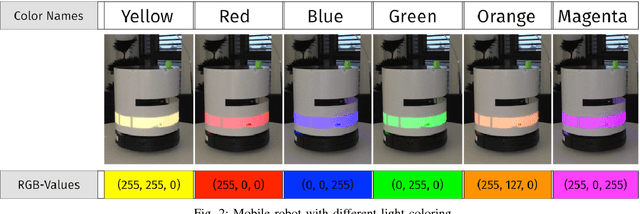
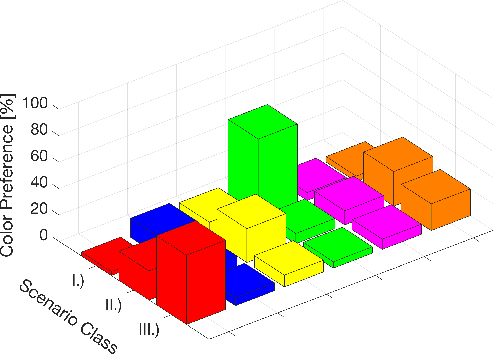
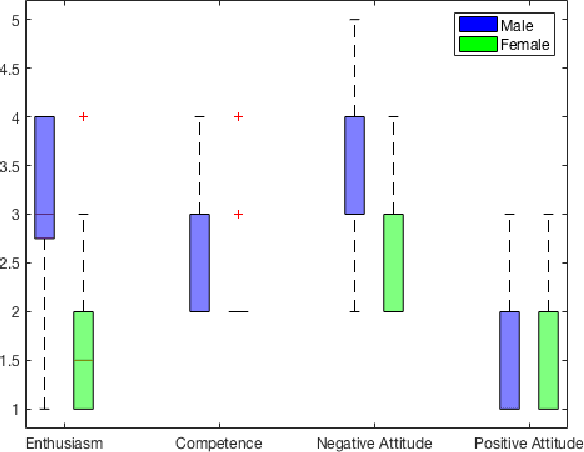
In times of more and more complex interaction techniques, we point out the powerfulness of colored light as a simple and cheap feedback mechanism. Since it is visible over a distance and does not interfere with other modalities, it is especially interesting for mobile robots. In an online survey, we asked 56 participants to choose the most appropriate colors for scenarios that were presented in the form of videos. In these scenarios a mobile robot accomplished tasks, in some with success, in others it failed because the task is not feasible, in others it stopped because it waited for help. We analyze in what way the color preferences differ between these three categories. The results show a connection between colors and meanings and that it depends on the participants' technical affinity, experience with robots and gender how clear the color preference is for a certain category. Finally, we found out that the participants' favorite color is not related to color preferences.
SwarmRob: A Toolkit for Reproducibility and Sharing of Experimental Artifacts in Robotics Research
Jan 25, 2018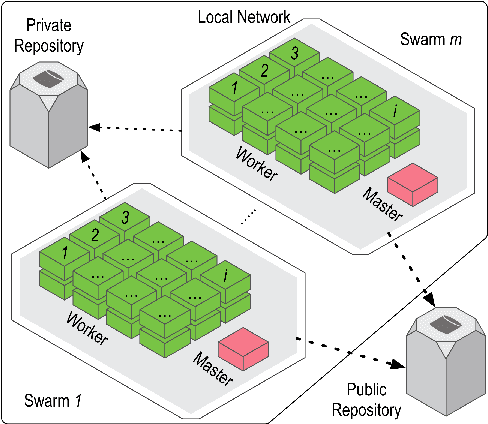
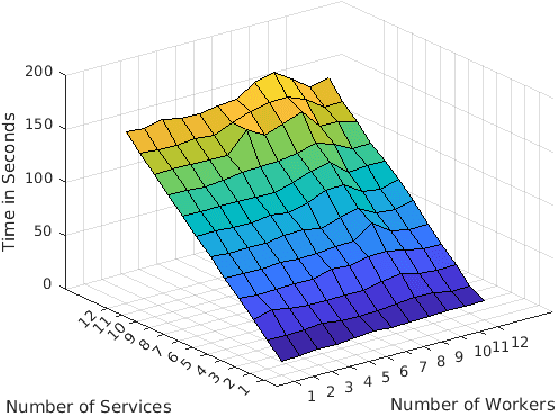

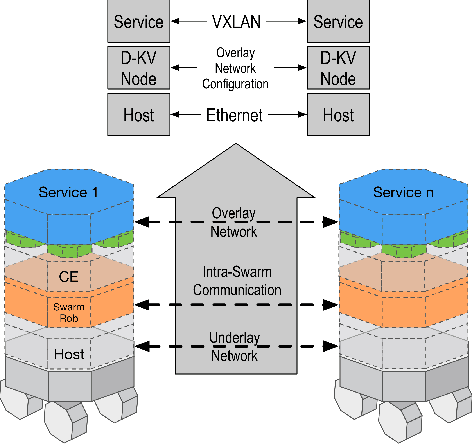
Due to the complexity of robotics, the reproducibility of results and experiments is one of the fundamental problems in robotics research. While the problem has been identified by the community, the approaches that address the problem appropriately are limited. The toolkit proposed in this paper tries to deal with the problem of reproducibility and sharing of experimental artifacts in robotics research by a holistic approach based on operating-system-level virtualization. The experimental artifacts of an experiment are isolated in "containers" that can be distributed to other researchers. Based on this, this paper presents a novel experimental workflow to describe, execute and distribute experimental software-artifacts to heterogeneous robots dynamically. As a result, the proposed solution supports researchers in executing and reproducing experimental evaluations.