 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgecoExplore: Combining multiple rankings for multi-robot exploration
Apr 10, 2023Multi-robot exploration is a field which tackles the challenge of exploring a previously unknown environment with a number of robots. This is especially relevant for search and rescue operations where time is essential. Current state of the art approaches are able to explore a given environment with a large number of robots by assigning them to frontiers. However, this assignment generally favors large frontiers and hence omits potentially valuable medium-sized frontiers. In this paper we showcase a novel multi-robot exploration algorithm, which improves and adapts the existing approaches. Through the addition of information gain based ranking we improve the exploration time for closed urban environments while maintaining similar exploration performance compared to the state-of-the-art for open environments. Accompanying this paper, we further publish our research code in order to lower the barrier to entry for further multi-robot exploration research. We evaluate the performance in three simulated scenarios, two urban and one open scenario, where our algorithm outperforms the state of the art by 5% overall.
Time-coded Spiking Fourier Transform in Neuromorphic Hardware
Mar 31, 2022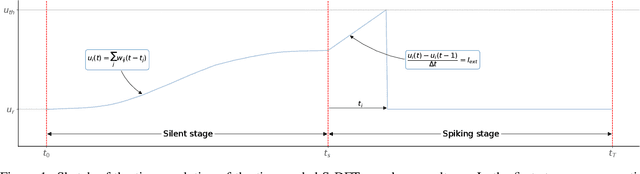
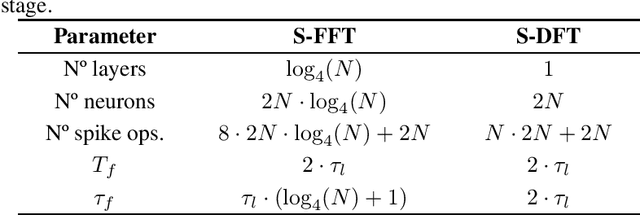
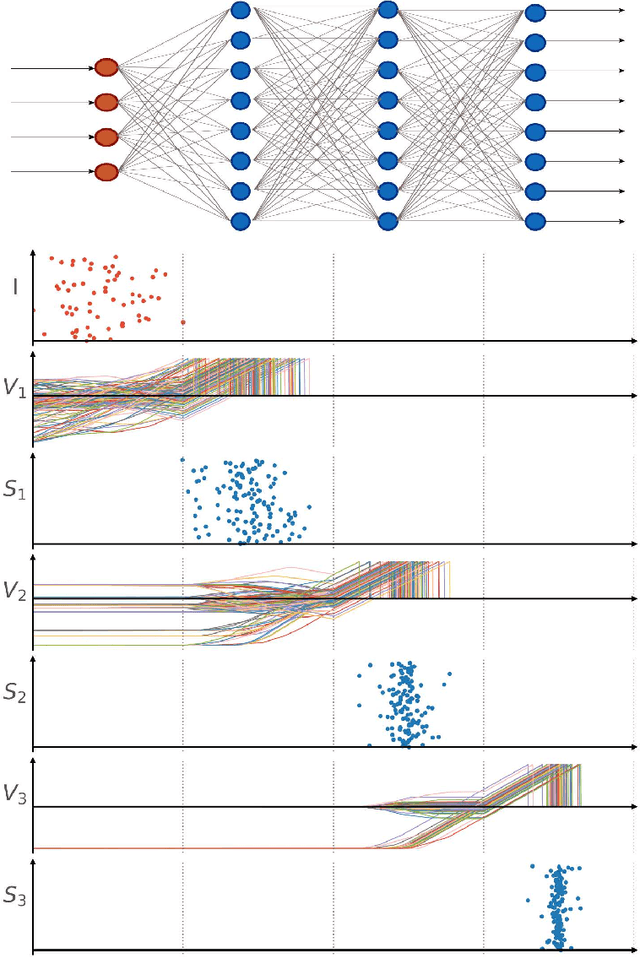
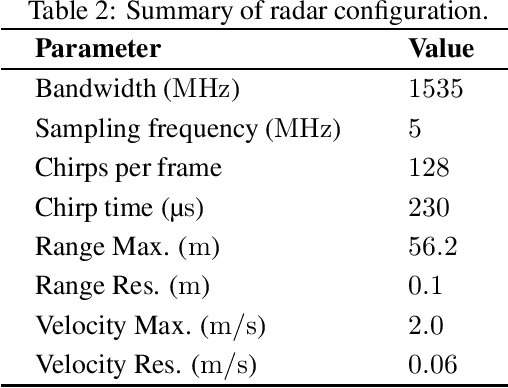
After several decades of continuously optimizing computing systems, the Moore's law is reaching itsend. However, there is an increasing demand for fast and efficient processing systems that can handlelarge streams of data while decreasing system footprints. Neuromorphic computing answers thisneed by creating decentralized architectures that communicate with binary events over time. Despiteits rapid growth in the last few years, novel algorithms are needed that can leverage the potential ofthis emerging computing paradigm and can stimulate the design of advanced neuromorphic chips.In this work, we propose a time-based spiking neural network that is mathematically equivalent tothe Fourier transform. We implemented the network in the neuromorphic chip Loihi and conductedexperiments on five different real scenarios with an automotive frequency modulated continuouswave radar. Experimental results validate the algorithm, and we hope they prompt the design of adhoc neuromorphic chips that can improve the efficiency of state-of-the-art digital signal processorsand encourage research on neuromorphic computing for signal processing.