 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSidewalk Measurements from Satellite Images: Preliminary Findings
Dec 12, 2021



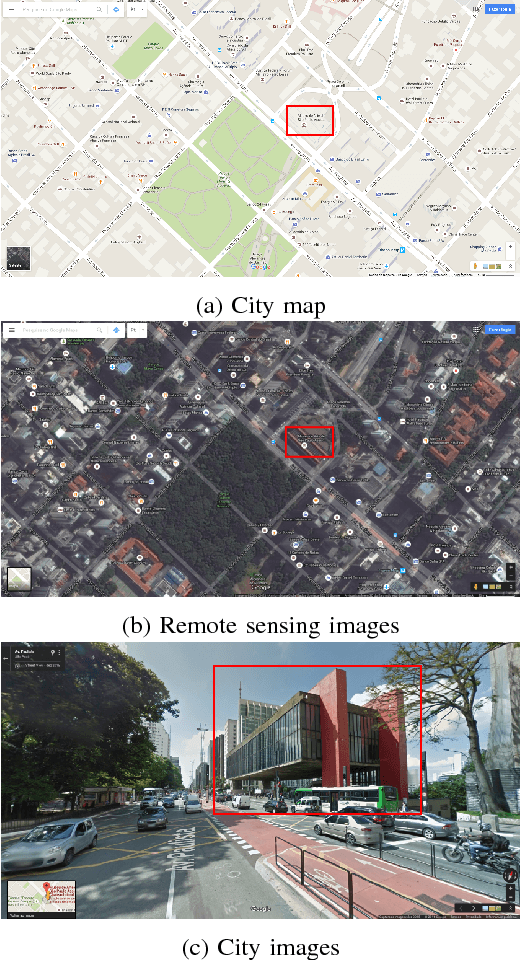
Large-scale analysis of pedestrian infrastructures, particularly sidewalks, is critical to human-centric urban planning and design. Benefiting from the rich data set of planimetric features and high-resolution orthoimages provided through the New York City Open Data portal, we train a computer vision model to detect sidewalks, roads, and buildings from remote-sensing imagery and achieve 83% mIoU over held-out test set. We apply shape analysis techniques to study different attributes of the extracted sidewalks. More specifically, we do a tile-wise analysis of the width, angle, and curvature of sidewalks, which aside from their general impacts on walkability and accessibility of urban areas, are known to have significant roles in the mobility of wheelchair users. The preliminary results are promising, glimpsing the potential of the proposed approach to be adopted in different cities, enabling researchers and practitioners to have a more vivid picture of the pedestrian realm.
A Structural Graph-Based Method for MRI Analysis
Aug 02, 2019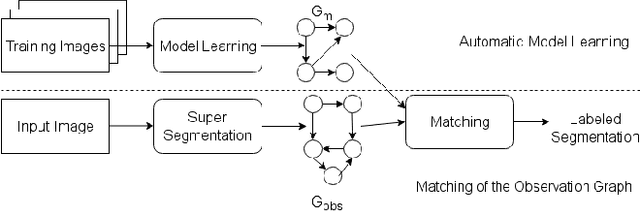
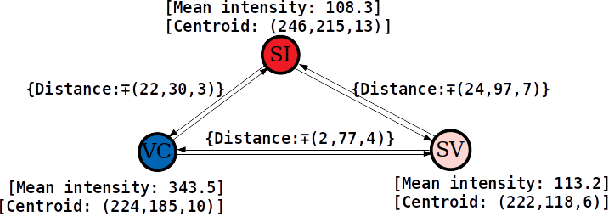
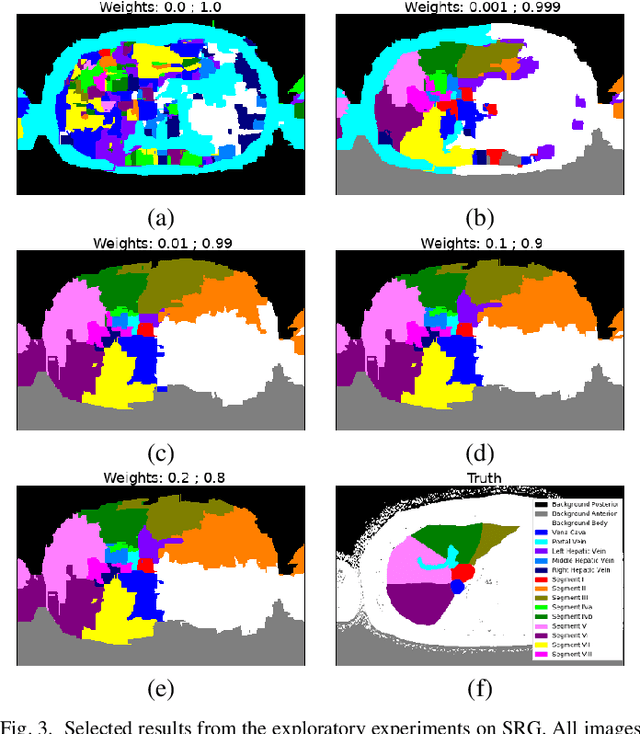
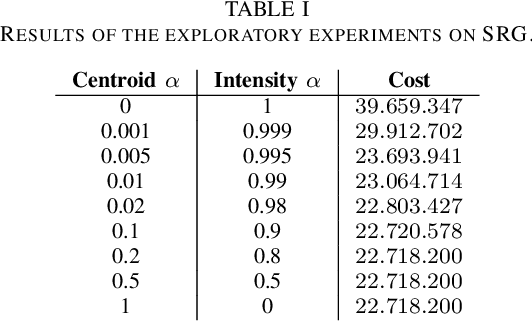
The importance of imaging exams, such as Magnetic Resonance Imaging (MRI), for the diagnostic and follow-up of pediatric pathologies and the assessment of anatomical structures' development has been increasingly highlighted in recent times. Manual analysis of MRIs is time-consuming, subjective, and requires significant expertise. To mitigate this, automatic techniques are necessary. Most techniques focus on adult subjects, while pediatric MRI has specific challenges such as the ongoing anatomical and histological changes related to normal development of the organs, reduced signal-to-noise ratio due to the smaller bodies, motion artifacts and cooperation issues, especially in long exams, which can in many cases preclude common analysis methods developed for use in adults. Therefore, the development of a robust technique to aid in pediatric MRI analysis is necessary. This paper presents the current development of a new method based on the learning and matching of structural relational graphs (SRGs). The experiments were performed on liver MRI sequences of one patient from ICr-HC-FMUSP, and preliminary results showcased the viability of the project. Future experiments are expected to culminate with an application for pediatric liver substructure and brain tumor segmentation.
A New Urban Objects Detection Framework Using Weakly Annotated Sets
Jul 14, 2017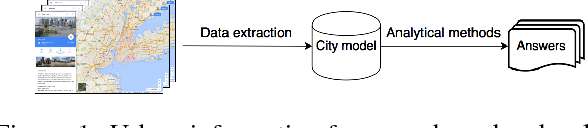
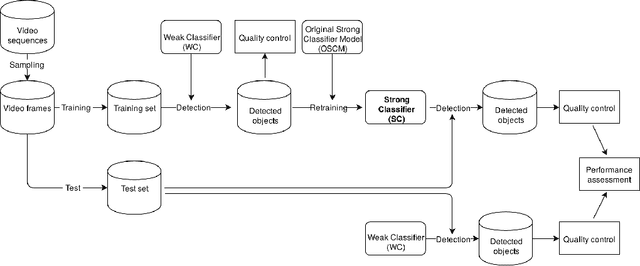
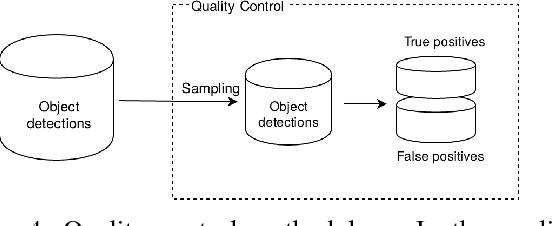
Urban informatics explore data science methods to address different urban issues intensively based on data. The large variety and quantity of data available should be explored but this brings important challenges. For instance, although there are powerful computer vision methods that may be explored, they may require large annotated datasets. In this work we propose a novel approach to automatically creating an object recognition system with minimal manual annotation. The basic idea behind the method is to use large input datasets using available online cameras on large cities. A off-the-shelf weak classifier is used to detect an initial set of urban elements of interest (e.g. cars, pedestrians, bikes, etc.). Such initial dataset undergoes a quality control procedure and it is subsequently used to fine tune a strong classifier. Quality control and comparative performance assessment are used as part of the pipeline. We evaluate the method for detecting cars based on monitoring cameras. Experimental results using real data show that despite losing generality, the final detector provides better detection rates tailored to the selected cameras. The programmed robot gathered 770 video hours from 24 online city cameras (\~300GB), which has been fed to the proposed system. Our approach has shown that the method nearly doubled the recall (93\%) with respect to state-of-the-art methods using off-the-shelf algorithms.
A Keygraph Classification Framework for Real-Time Object Detection
Jan 30, 2009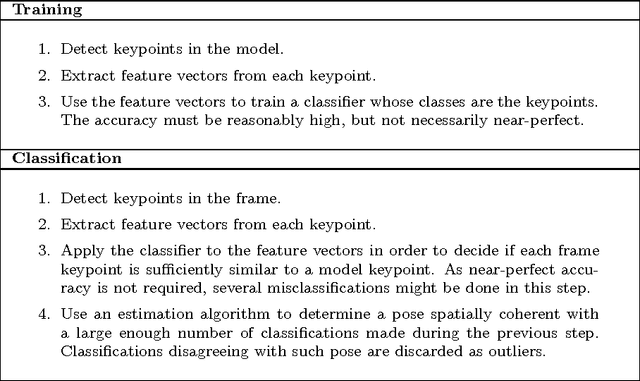
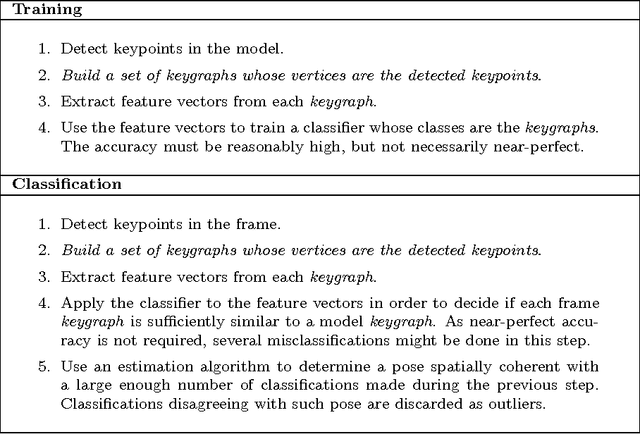
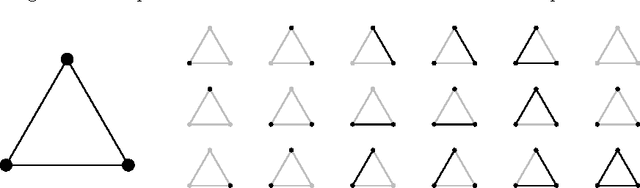
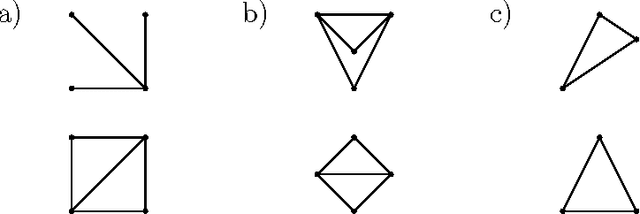
In this paper, we propose a new approach for keypoint-based object detection. Traditional keypoint-based methods consist in classifying individual points and using pose estimation to discard misclassifications. Since a single point carries no relational features, such methods inherently restrict the usage of structural information to the pose estimation phase. Therefore, the classifier considers purely appearance-based feature vectors, thus requiring computationally expensive feature extraction or complex probabilistic modelling to achieve satisfactory robustness. In contrast, our approach consists in classifying graphs of keypoints, which incorporates structural information during the classification phase and allows the extraction of simpler feature vectors that are naturally robust. In the present work, 3-vertices graphs have been considered, though the methodology is general and larger order graphs may be adopted. Successful experimental results obtained for real-time object detection in video sequences are reported.