 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExternal-Wrench Estimation for Aerial Robots Exploiting a Learned Model
Apr 10, 2025This paper presents an external wrench estimator that uses a hybrid dynamics model consisting of a first-principles model and a neural network. This framework addresses one of the limitations of the state-of-the-art model-based wrench observers: the wrench estimation of these observers comprises the external wrench (e.g. collision, physical interaction, wind); in addition to residual wrench (e.g. model parameters uncertainty or unmodeled dynamics). This is a problem if these wrench estimations are to be used as wrench feedback to a force controller, for example. In the proposed framework, a neural network is combined with a first-principles model to estimate the residual dynamics arising from unmodeled dynamics and parameters uncertainties, then, the hybrid trained model is used to estimate the external wrench, leading to a wrench estimation that has smaller contributions from the residual dynamics, and affected more by the external wrench. This method is validated with numerical simulations of an aerial robot in different flying scenarios and different types of residual dynamics, and the statistical analysis of the results shows that the wrench estimation error has improved significantly compared to a model-based wrench observer using only a first-principles model.
Robust online identification of thermal models for in-production HPC clusters with machine learning-based data selection
Oct 03, 2018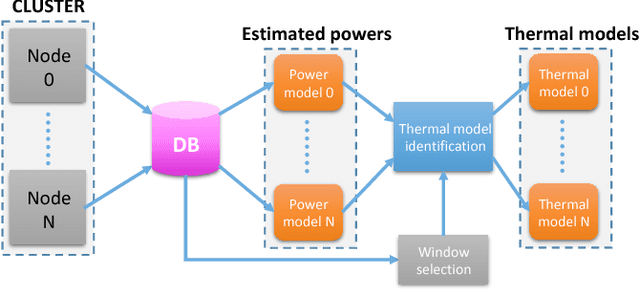
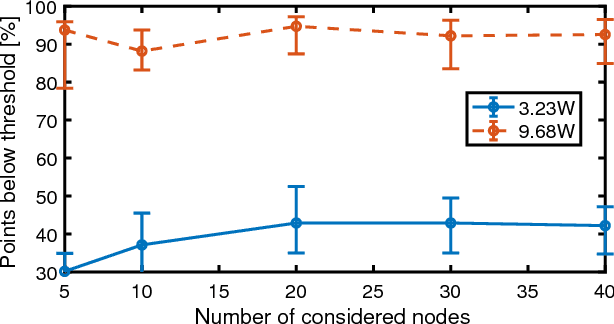
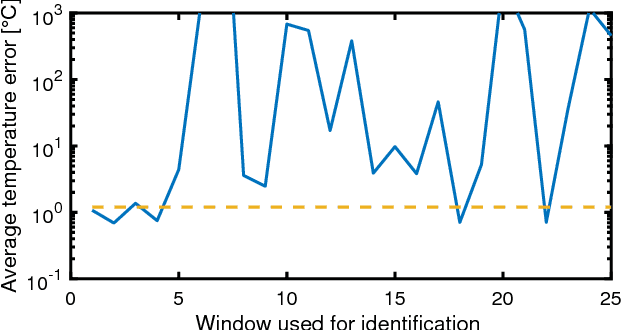
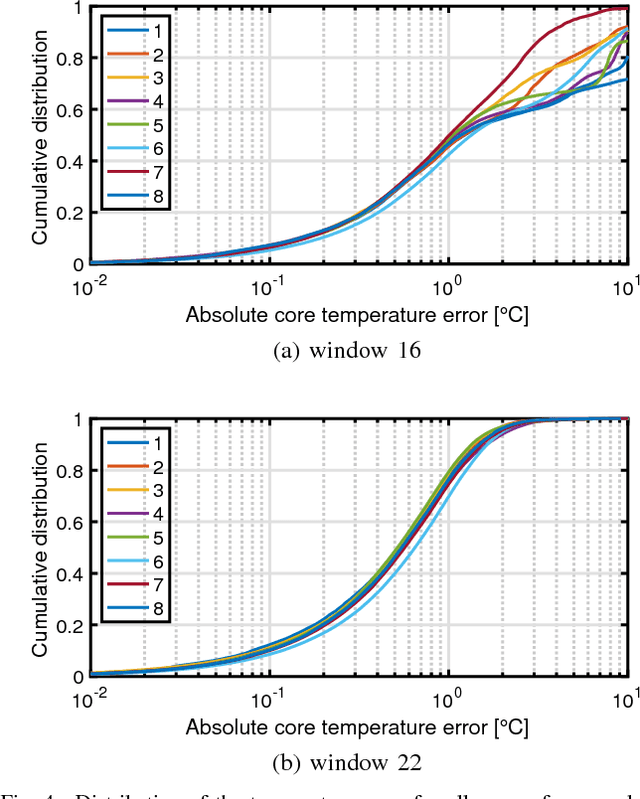
Power and thermal management are critical components of high performance computing (HPC) systems, due to their high power density and large total power consumption. The assessment of thermal dissipation by means of compact models directly from the thermal response of the final device enables more robust and precise thermal control strategies as well as automated diagnosis. However, when dealing with large scale systems "in production" the accuracy of learned thermal models depends on the dynamics of the power excitation, which depends also on the executed workload, and measurement nonidealities, such as quantization. In this paper we show that, using an advanced system identification algorithm, we are able to generate very accurate thermal models (average error lower than our sensors quantization step of 1{\deg}C) for a large scale HPC system on real workloads. However, we also show that: 1) not all real workloads allow for the identification of a good model; 2) starting from the theory of system identification it is very difficult to evaluate if a trace of data leads to a good estimated model. We then propose and validate a set of techniques based on machine learning and deep learning algorithms for the choice of data traces to be used for model identification. We also show that only via deep learning techniques these traces can be correctly chosen up to 96% of the times.