 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDriver Drowsiness Detection System: An Approach By Machine Learning Application
Mar 11, 2023The majority of human deaths and injuries are caused by traffic accidents. A million people worldwide die each year due to traffic accident injuries, consistent with the World Health Organization. Drivers who do not receive enough sleep, rest, or who feel weary may fall asleep behind the wheel, endangering both themselves and other road users. The research on road accidents specified that major road accidents occur due to drowsiness while driving. These days, it is observed that tired driving is the main reason to occur drowsiness. Now, drowsiness becomes the main principle for to increase in the number of road accidents. This becomes a major issue in a world which is very important to resolve as soon as possible. The predominant goal of all devices is to improve the performance to detect drowsiness in real time. Many devices were developed to detect drowsiness, which depend on different artificial intelligence algorithms. So, our research is also related to driver drowsiness detection which can identify the drowsiness of a driver by identifying the face and then followed by eye tracking. The extracted eye image is matched with the dataset by the system. With the help of the dataset, the system detected that if eyes were close for a certain range, it could ring an alarm to alert the driver and if the eyes were open after the alert, then it could continue tracking. If the eyes were open then the score that we set decreased and if the eyes were closed then the score increased. This paper focus to resolve the problem of drowsiness detection with an accuracy of 80% and helps to reduce road accidents.
MACOptions: Multi-Agent Learning with Centralized Controller and Options Framework
Feb 07, 2023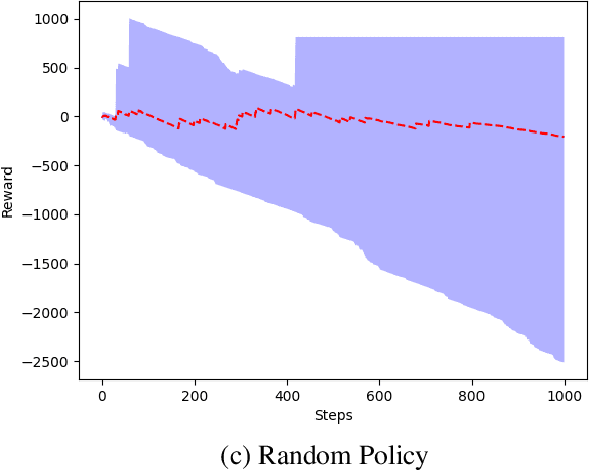
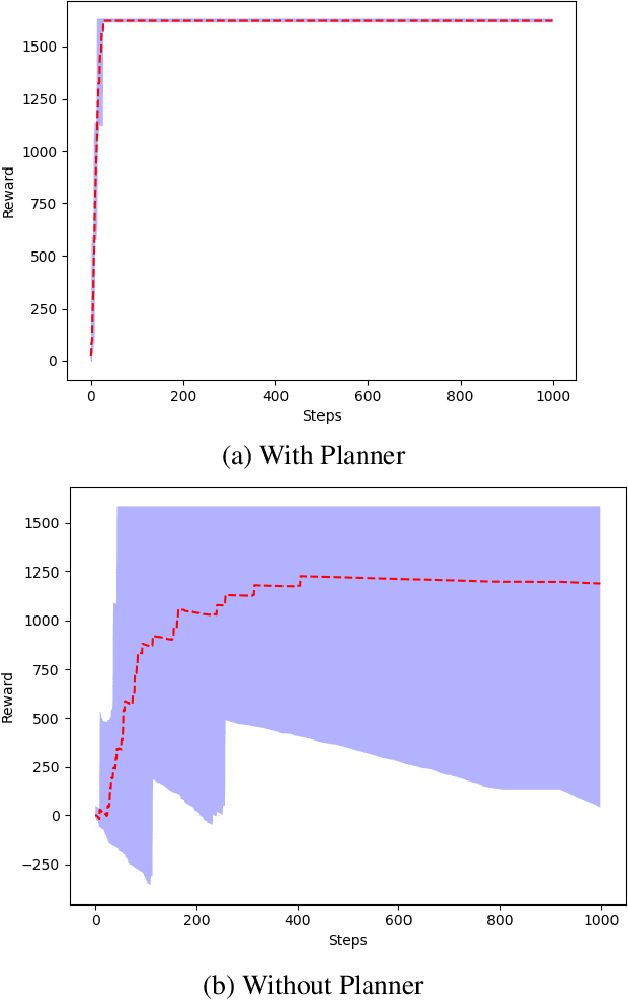
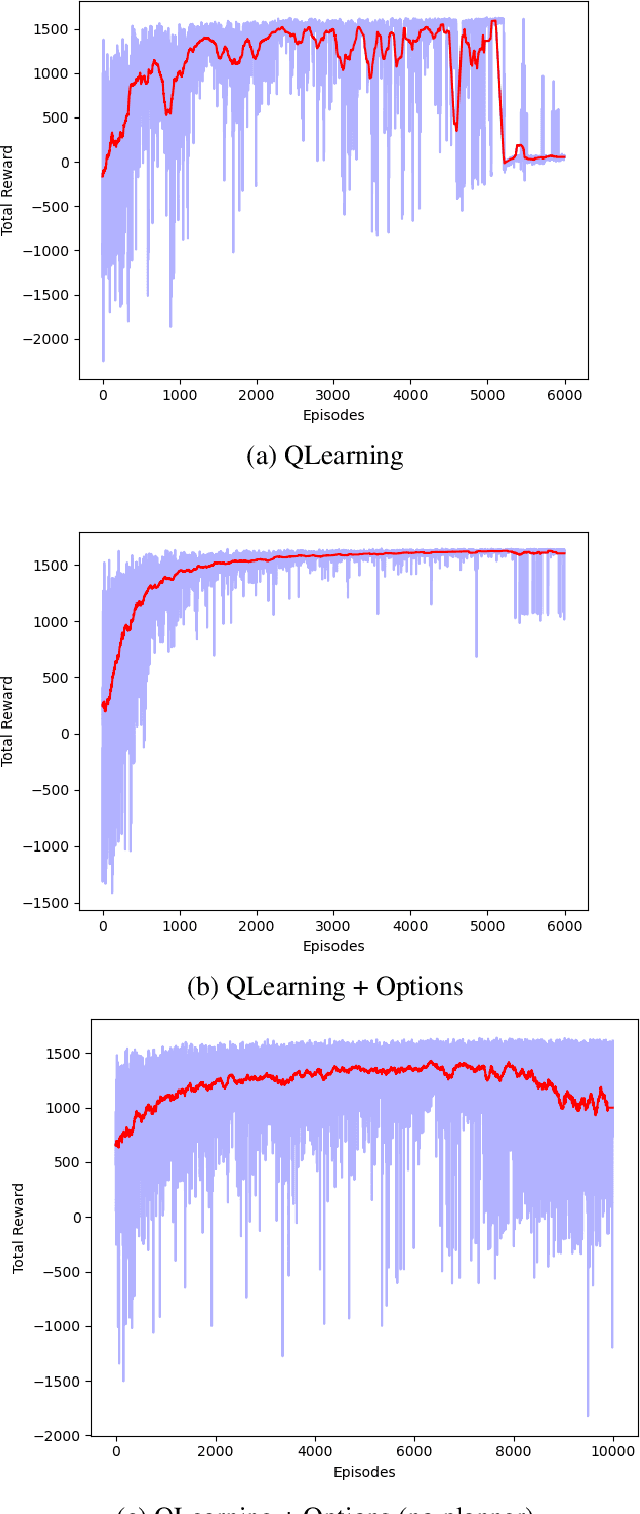
These days automation is being applied everywhere. In every environment, planning for the actions to be taken by the agents is an important aspect. In this paper, we plan to implement planning for multi-agents with a centralized controller. We compare three approaches: random policy, Q-learning, and Q-learning with Options Framework. We also show the effectiveness of planners by showing performance comparison between Q-Learning with Planner and without Planner.