 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReducing Discomfort in Driving Simulators: Motion Cueing for Motion Sickness Mitigation
Oct 02, 2025Driving simulators are increasingly used in research and development. However, simulators often cause motion sickness due to downscaled motion and unscaled veridical visuals. In this paper, a motion cueing algorithm is proposed that reduces motion sickness as predicted by the subjective vertical conflict (SVC) model using model predictive control (MPC). Both sensory conflict and specific force errors are penalised in the cost function, allowing the algorithm to jointly optimise fidelity and comfort. Human-in-the-loop experiments were conducted to compare four simulator motion settings: two variations of our MPC-based algorithm, one focused on pure specific force tracking and the second compromising specific force tracking and motion sickness minimisation, as well as reference adaptive washout and no motion cases. The experiments were performed on a hexapod driving simulator with participants exposed to passive driving. Experimental motion sickness results closely matched the sickness model predictions. As predicted by the model, the no motion condition yielded the lowest sickness levels. However, it was rated lowest in terms of fidelity. The compromise solution reduced sickness by over 50% (average MISC level 3 to 1.5) compared to adaptive washout and the algorithm focusing on specific force tracking, without any significant reduction in fidelity rating. The proposed approach for developing MCA that takes into account both the simulator dynamics and time evolution of motion sickness offers a significant advancement in achieving an optimal control of motion sickness and specific force recreation in driving simulators, supporting broader simulator use.
A Vehicle System for Navigating Among Vulnerable Road Users Including Remote Operation
May 08, 2025



We present a vehicle system capable of navigating safely and efficiently around Vulnerable Road Users (VRUs), such as pedestrians and cyclists. The system comprises key modules for environment perception, localization and mapping, motion planning, and control, integrated into a prototype vehicle. A key innovation is a motion planner based on Topology-driven Model Predictive Control (T-MPC). The guidance layer generates multiple trajectories in parallel, each representing a distinct strategy for obstacle avoidance or non-passing. The underlying trajectory optimization constrains the joint probability of collision with VRUs under generic uncertainties. To address extraordinary situations ("edge cases") that go beyond the autonomous capabilities - such as construction zones or encounters with emergency responders - the system includes an option for remote human operation, supported by visual and haptic guidance. In simulation, our motion planner outperforms three baseline approaches in terms of safety and efficiency. We also demonstrate the full system in prototype vehicle tests on a closed track, both in autonomous and remotely operated modes.
Efficient Motion Sickness Assessment: Recreation of On-Road Driving on a Compact Test Track
Dec 19, 2024The ability to engage in other activities during the ride is considered by consumers as one of the key reasons for the adoption of automated vehicles. However, engagement in non-driving activities will provoke occupants' motion sickness, deteriorating their overall comfort and thereby risking acceptance of automated driving. Therefore, it is critical to extend our understanding of motion sickness and unravel the modulating factors that affect it through experiments with participants. Currently, most experiments are conducted on public roads (realistic but not reproducible) or test tracks (feasible with prototype automated vehicles). This research study develops a method to design an optimal path and speed reference to efficiently replicate on-road motion sickness exposure on a small test track. The method uses model predictive control to replicate the longitudinal and lateral accelerations collected from on-road drives on a test track of 70 m by 175 m. A within-subject experiment (47 participants) was conducted comparing the occupants' motion sickness occurrence in test-track and on-road conditions, with the conditions being cross-randomized. The results illustrate no difference and no effect of the condition on the occurrence of the average motion sickness across the participants. Meanwhile, there is an overall correspondence of individual sickness levels between on-road and test-track. This paves the path for the employment of our method for a simpler, safer and more replicable assessment of motion sickness.
A Learning-Based Model Predictive Contouring Control for Vehicle Evasive Manoeuvres
Aug 08, 2024
This paper presents a novel Learning-based Model Predictive Contouring Control (L-MPCC) algorithm for evasive manoeuvres at the limit of handling. The algorithm uses the Student-t Process (STP) to minimise model mismatches and uncertainties online. The proposed STP captures the mismatches between the prediction model and the measured lateral tyre forces and yaw rate. The mismatches correspond to the posterior means provided to the prediction model to improve its accuracy. Simultaneously, the posterior covariances are propagated to the vehicle lateral velocity and yaw rate along the prediction horizon. The STP posterior covariance directly depends on the variance of observed data, so its variance is more significant when the online measurements differ from the recorded ones in the training set and smaller in the opposite case. Thus, these covariances can be utilised in the L-MPCC's cost function to minimise the vehicle state uncertainties. In a high-fidelity simulation environment, we demonstrate that the proposed L-MPCC can successfully avoid obstacles, keeping the vehicle stable while driving a double lane change manoeuvre at a higher velocity than an MPCC without STP. Furthermore, the proposed controller yields a significantly lower peak sideslip angle, improving the vehicle's manoeuvrability compared to an L-MPCC with a Gaussian Process.
Motion Cueing Algorithm for Effective Motion Perception: A frequency-splitting MPC Approach
Sep 04, 2023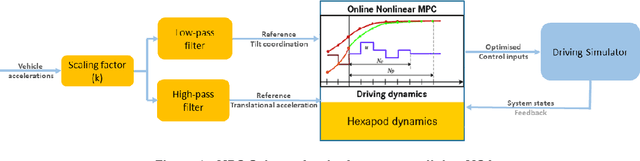

Model predictive control (MPC) is a promising technique for motion cueing in driving simulators, but its high computation time limits widespread real-time application. This paper proposes a hybrid algorithm that combines filter-based and MPC-based techniques to improve specific force tracking while reducing computation time. The proposed algorithm divides the reference acceleration into low-frequency and high-frequency components. The high-frequency component serves as a reference for translational motion to avoid workspace limit violations, while the low-frequency component is for tilt coordination. The total acceleration serves as a reference for combined specific force with the highest priority to enable compensation of deviations from its reference values. The algorithm uses constraints in the MPC formulation to account for workspace limits and workspace management is applied. The investigated scenarios were a step signal, a multi-sine wave and a recorded real-drive slalom maneuver. Based on the conducted simulations, the algorithm produces approximately 15% smaller root means squared error (RMSE) for the step signal compared to the state-of-the-art. Around 16% improvement is observed when the real-drive scenario is used as the simulation scenario, and for the multi-sine wave, 90% improvement is observed. At higher prediction horizons the algorithm matches the performance of a state-of-the-art MPC-based motion cueing algorithm. Finally, for all prediction horizons, the frequency-splitting algorithm produced faster results. The pre-generated references reduce the required prediction horizon and computational complexity while improving tracking performance. Hence, the proposed frequency-splitting algorithm outperforms state-of-the-art MPC-based algorithm and offers promise for real-time application in driving simulators.
Model Predictive Contouring Control for Vehicle Obstacle Avoidance at the Limit of Handling
Aug 13, 2023


This paper proposes a non-linear Model Predictive Contouring Control (MPCC) for obstacle avoidance in automated vehicles driven at the limit of handling. The proposed controller integrates motion planning, path tracking and vehicle stability objectives, prioritising obstacle avoidance in emergencies. The controller's prediction model is a non-linear single-track vehicle model with the Fiala tyre to capture the vehicle's non-linear behaviour. The MPCC computes the optimal steering angle and brake torques to minimise tracking error in safe situations and maximise the vehicle-to-obstacle distance in emergencies. Furthermore, the MPCC is extended with the tyre friction circle to fully exploit the vehicle's manoeuvrability and stability. The MPCC controller is tested using real-time rapid prototyping hardware to prove its real-time capability. The performance is compared with a state-of-the-art Model Predictive Control (MPC) in a high-fidelity simulation environment. The double lane change scenario results demonstrate a significant improvement in successfully avoiding obstacles and maintaining vehicle stability.
The impact of body and head dynamics on motion comfort assessment
Jul 07, 2023Head motion is a key determinant of motion comfort and differs substantially from seat motion due to seat and body compliance and dynamic postural stabilization. This paper compares different human body model fidelities to transmit seat accelerations to the head for the assessment of motion comfort through simulations. Six-degree of freedom dynamics were analyzed using frequency response functions derived from an advanced human model (AHM), a computationally efficient human model (EHM) and experimental studies. Simulations of dynamic driving show that human models strongly affected the predicted ride comfort (increased up to a factor 3). Furthermore, they modestly affected sickness using the available filters from the literature and ISO-2631 (increased up to 30%), but more strongly affected sickness predicted by the subjective vertical conflict (SVC) model (increased up to 70%).
Motion comfort and driver feel: An explorative study about their relation in remote driving
May 12, 2023Teleoperation is considered as a viable option to control fully automated vehicles (AVs) of Level 4 and 5 in special conditions. However, by bringing the remote drivers in the loop, their driving experience should be realistic to secure safe and comfortable remote control.Therefore, the remote control tower should be designed such that remote drivers receive high quality cues regarding the vehicle state and the driving environment. In this direction, the steering feedback could be manipulated to provide feedback to the remote drivers regarding how the vehicle reacts to their commands. However, until now, it is unclear how the remote drivers' steering feel could impact occupant's motion comfort. This paper focuses on exploring how the driver feel in remote (RD) and normal driving (ND) are related with motion comfort. More specifically, different types of steering feedback controllers are applied in (a) the steering system of a Research Concept Vehicle-model E (RCV-E) and (b) the steering system of a remote control tower. An experiment was performed to assess driver feel when the RCV-E is normally and remotely driven. Subjective assessment and objective metrics are employed to assess drivers' feel and occupants' motion comfort in both remote and normal driving scenarios. The results illustrate that motion sickness and ride comfort are only affected by the steering velocity in remote driving, while throttle input variations affect them in normal driving. The results demonstrate that motion sickness and steering velocity increase both around 25$\%$ from normal to remote driving.
Effects of seat back height and posture on 3D vibration transmission to pelvis, trunk and head
Jul 05, 2022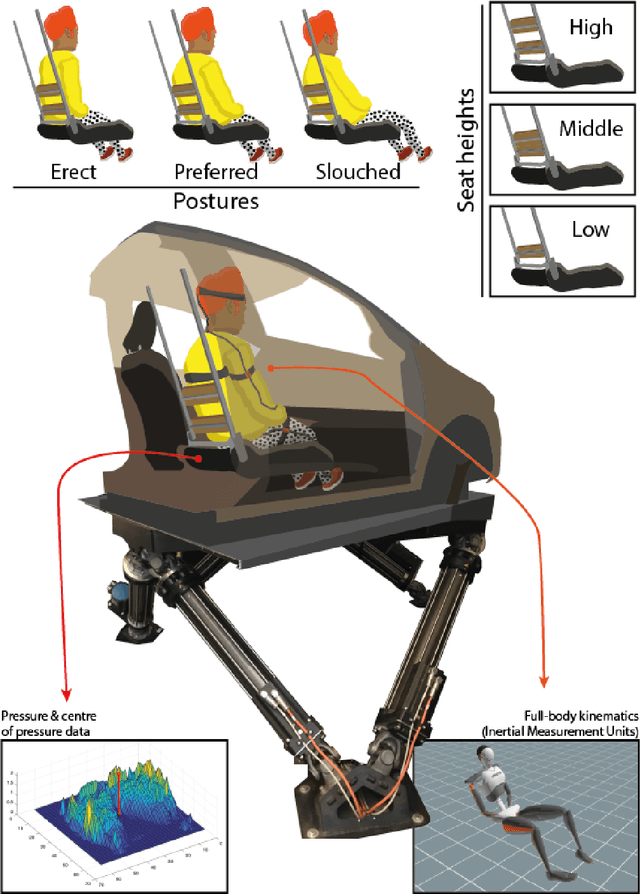
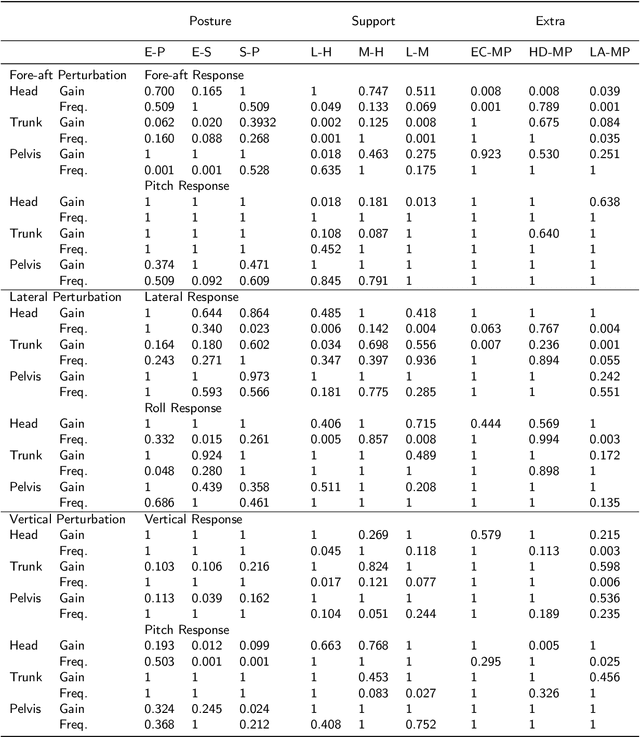
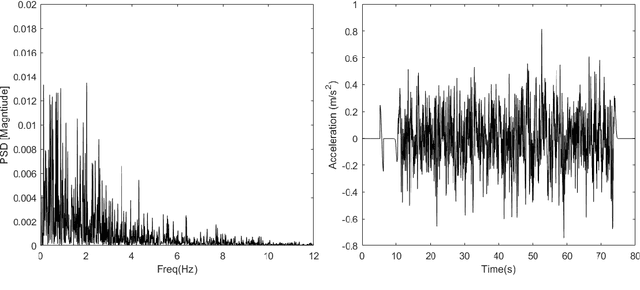
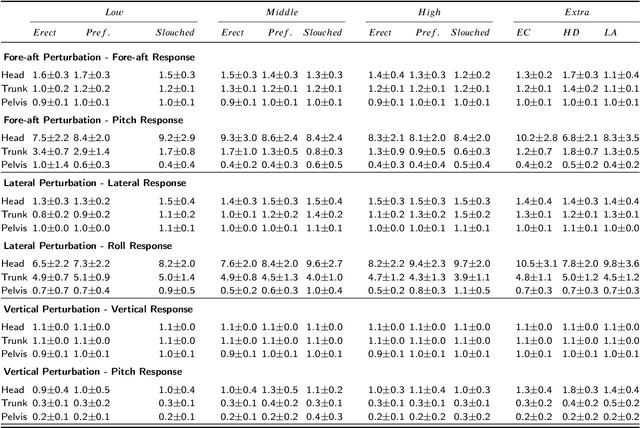
Vibration transmission is essential in the design of comfortable vehicle seats but knowledge is lacking on 3D trunk and head motion and the role of seat back and posture. We hypothesized that head motion is reduced when participants upper back is unsupported, as this stimulates active postural control. We developed an experimental methodology to evaluate 3D vibration transmission from compliant seats to the human body. Wide-band (0.1-12 Hz) motion stimuli were applied in fore-aft, lateral and vertical direction to evaluate the translational and rotational body response in pelvis, trunk and head. A standard car seat was equipped with a configurable and compliant back support to test 3 support heights and 3 sitting postures (erect, slouched, and preferred) where we also tested head down looking at a smartphone. Seat back support height and sitting posture substantially affected vibration transmission and affected low-frequency responses in particular for body segment rotation. According to our hypothesis a low support height proved beneficial in reducing head motion. Relevance to industry: Our methodology effectively evaluates 3D wide-band vibration transmission from compliant seats to the human body. The lowest back support height reduced head motion but was perceived as least comfortable. This calls for seat designs which support but do not so much constrain the upper back. The head down posture enlarged head motion, pleading for computer system integration allowing heads up postures in future automated cars. The biomechanical data will serve to validate human models supporting the design of comfortable (automated) vehicles.