 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAuraSense: Robot Collision Avoidance by Full Surface Proximity Detection
Aug 10, 2021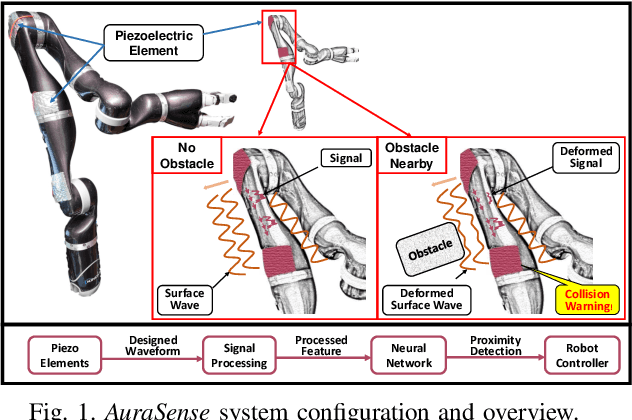
Perceiving obstacles and avoiding collisions is fundamental to the safe operation of a robot system, particularly when the robot must operate in highly dynamic human environments. Proximity detection using on-robot sensors can be used to avoid or mitigate impending collisions. However, existing proximity sensing methods are orientation and placement dependent, resulting in blind spots even with large numbers of sensors. In this paper, we introduce the phenomenon of the Leaky Surface Wave (LSW), a novel sensing modality, and present AuraSense, a proximity detection system using the LSW. AuraSense is the first system to realize no-dead-spot proximity sensing for robot arms. It requires only a single pair of piezoelectric transducers, and can easily be applied to off-the-shelf robots with minimal modifications. We further introduce a set of signal processing techniques and a lightweight neural network to address the unique challenges in using the LSW for proximity sensing. Finally, we demonstrate a prototype system consisting of a single piezoelectric element pair on a robot manipulator, which validates our design. We conducted several micro benchmark experiments and performed more than 2000 on-robot proximity detection trials with various potential robot arm materials, colliding objects, approach patterns, and robot movement patterns. AuraSense achieves 100% and 95.3% true positive proximity detection rates when the arm approaches static and mobile obstacles respectively, with a true negative rate over 99%, showing the real-world viability of this system.