 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh-speed electrical connector assembly by structured compliance in a finray-effect gripper
Jul 28, 2023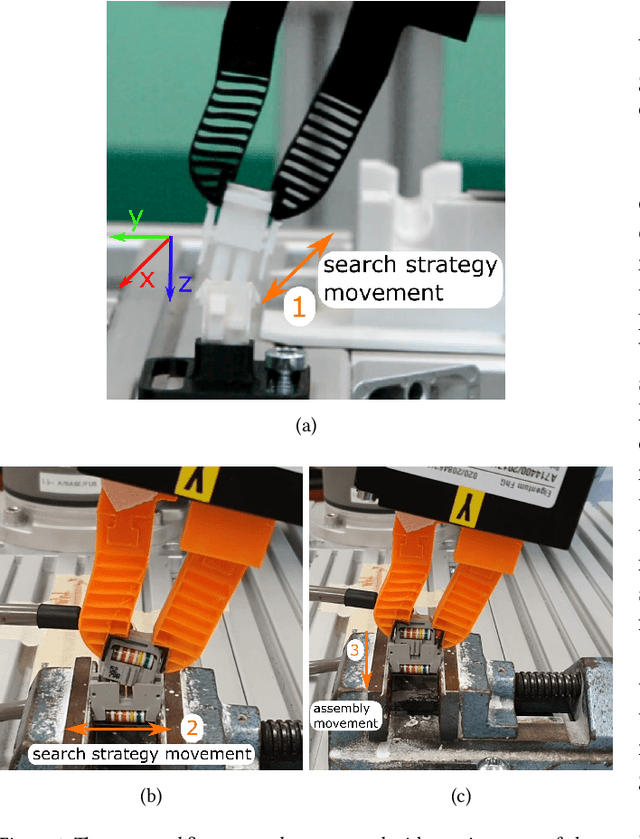
Fine assembly tasks such as electrical connector insertion have tight tolerances and sensitive components, requiring compensation of alignment errors while applying sufficient force in the insertion direction, ideally at high speeds and while grasping a range of components. Vision, tactile, or force sensors can compensate alignment errors, but have limited bandwidth, limiting the safe assembly speed. Passive compliance such as silicone-based fingers can reduce collision forces and grasp a range of components, but often cannot provide the accuracy or assembly forces required. To support high-speed mechanical search and self-aligning insertion, this paper proposes monolithic additively manufactured fingers which realize a moderate, structured compliance directly proximal to the gripped object. The geometry of finray-effect fingers are adapted to add form-closure features and realize a directionally-dependent stiffness at the fingertip, with a high stiffness to apply insertion forces and lower transverse stiffness to support alignment. Design parameters and mechanical properties of the fingers are investigated with FEM and empirical studies, analyzing the stiffness, maximum load, and viscoelastic effects. The fingers realize a remote center of compliance, which is shown to depend on the rib angle, and a directional stiffness ratio of $14-36$. The fingers are applied to a plug insertion task, realizing a tolerance window of $7.5$ mm and approach speeds of $1.3$ m/s.
Flexure-based Environmental Compliance for High-speed Robotic Contact Tasks
Mar 14, 2022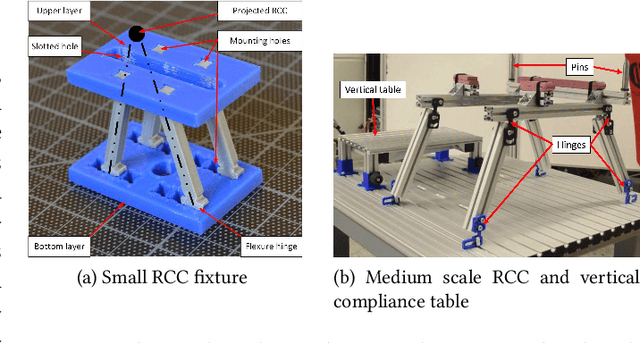
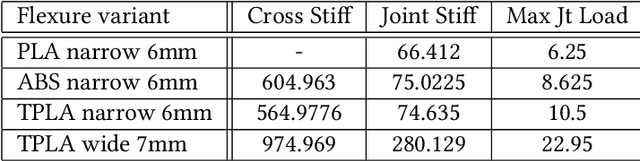
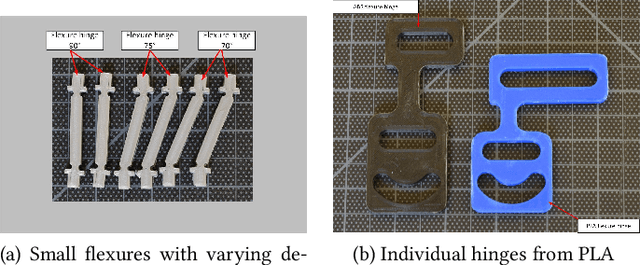
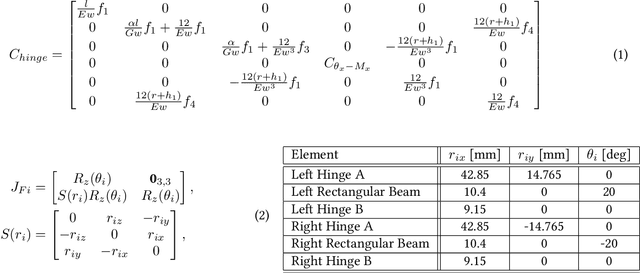
The design of physical compliance -- its location, degree, and structure -- affects robot performance and robustness in contact-rich tasks. While compliance is often used in the robot's joints, flange, or end-effector, this paper proposes compliant structures in the environment, allowing safe and robust contact while keeping the higher motion control bandwidth and precision of high impedance robots. Compliance is here realized with flexures and viscoelastic materials, which are integrated to several mechanisms to offer structured compliance, such as a remote center of compliance. Additive manufacturing with fused deposition modeling is used, allowing faster design iteration and low-cost integration with standard industrial equipment. Mechanical properties, including the total stiffness matrix, stiffness ratio, and rotational precision, are analytically determined and compared to experimental results. Three remote center of compliance (RCC) devices and a 1-DOF linear device are prototyped and tested in high-speed assembly tasks.
Contact Information Flow and Design of Compliance
Oct 24, 2021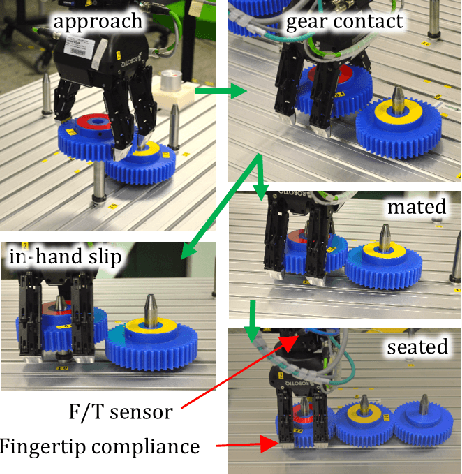
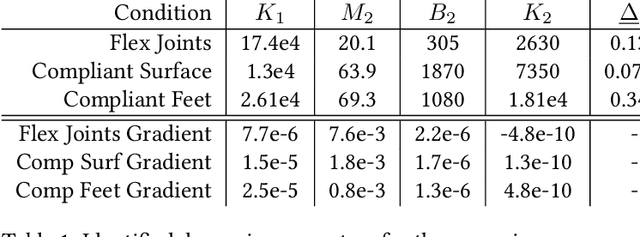
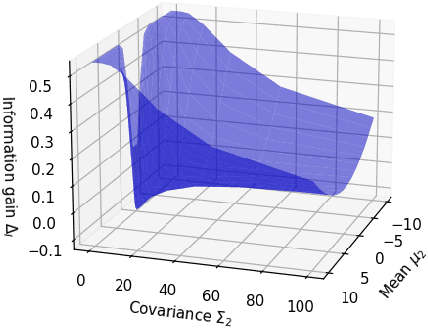
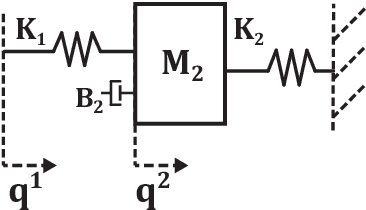
The objective of many contact-rich manipulation tasks can be expressed as desired contacts between environmental objects. Simulation and planning for rigid-body contact continues to advance, but the achievable performance is significantly impacted by hardware design, such as physical compliance and sensor placement. Much of mechatronic design for contact is done from a continuous controls perspective (e.g. peak collision force, contact stability), but hardware also affects the ability to infer discrete changes in contact. Robustly detecting contact state can support the correction of errors, both online and in trial-and-error learning. Here, discrete contact states are considered as changes in environmental dynamics, and the ability to infer this with proprioception (motor position and force sensors) is investigated. A metric of information gain is proposed, measuring the reduction in contact belief uncertainty from force/position measurements, and developed for fully- and partially-observed systems. The information gain depends on the coupled robot/environment dynamics and sensor placement, especially the location and degree of compliance. Hardware experiments over a range of physical compliance conditions validate that information gain predicts the speed and certainty with which contact is detected in (i) monitoring of contact-rich assembly and (ii) collision detection. Compliant environmental structures are then optimized to allow industrial robots to achieve safe, higher-speed contact.