 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContact Information Flow and Design of Compliance
Paper and Code
Oct 24, 2021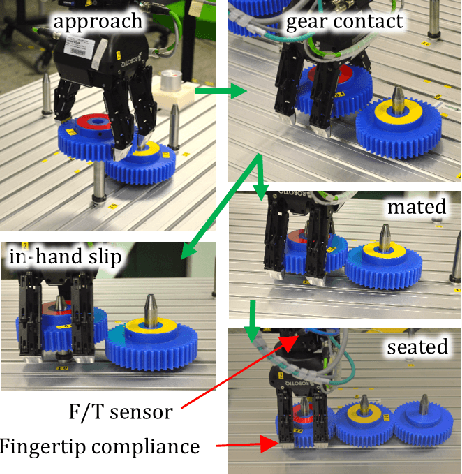
The objective of many contact-rich manipulation tasks can be expressed as desired contacts between environmental objects. Simulation and planning for rigid-body contact continues to advance, but the achievable performance is significantly impacted by hardware design, such as physical compliance and sensor placement. Much of mechatronic design for contact is done from a continuous controls perspective (e.g. peak collision force, contact stability), but hardware also affects the ability to infer discrete changes in contact. Robustly detecting contact state can support the correction of errors, both online and in trial-and-error learning. Here, discrete contact states are considered as changes in environmental dynamics, and the ability to infer this with proprioception (motor position and force sensors) is investigated. A metric of information gain is proposed, measuring the reduction in contact belief uncertainty from force/position measurements, and developed for fully- and partially-observed systems. The information gain depends on the coupled robot/environment dynamics and sensor placement, especially the location and degree of compliance. Hardware experiments over a range of physical compliance conditions validate that information gain predicts the speed and certainty with which contact is detected in (i) monitoring of contact-rich assembly and (ii) collision detection. Compliant environmental structures are then optimized to allow industrial robots to achieve safe, higher-speed contact.