 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyRRT-Connect: Bidirectional Motion Planning for Hybrid Dynamical Systems
Apr 14, 2025

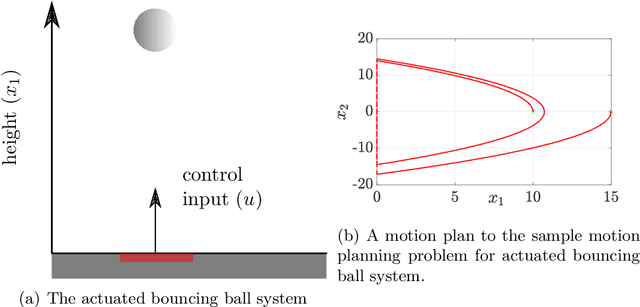

This paper proposes a bidirectional rapidly-exploring random trees (RRT) algorithm to solve the motion planning problem for hybrid systems. The proposed algorithm, called HyRRT-Connect, propagates in both forward and backward directions in hybrid time until an overlap between the forward and backward propagation results is detected. Then, HyRRT-Connect constructs a motion plan through the reversal and concatenation of functions defined on hybrid time domains, ensuring that the motion plan satisfies the given hybrid dynamics. To address the potential discontinuity along the flow caused by tolerating some distance between the forward and backward partial motion plans, we reconstruct the backward partial motion plan by a forward-in-hybrid-time simulation from the final state of the forward partial motion plan. effectively eliminating the discontinuity. The proposed algorithm is applied to an actuated bouncing ball system and a walking robot example to highlight its computational improvement.
A Safe Hybrid Control Framework for Car-like Robot with Guaranteed Global Path-Invariance using a Control Barrier Function
Feb 11, 2025



This work proposes a hybrid framework for car-like robots with obstacle avoidance, global convergence, and safety, where safety is interpreted as path invariance, namely, once the robot converges to the path, it never leaves the path. Given a priori obstacle-free feasible path where obstacles can be around the path, the task is to avoid obstacles while reaching the path and then staying on the path without leaving it. The problem is solved in two stages. Firstly, we define a ``tight'' obstacle-free neighborhood along the path and design a local controller to ensure convergence to the path and path invariance. The control barrier function technology is involved in the control design to steer the system away from its singularity points, where the local path invariant controller is not defined. Secondly, we design a hybrid control framework that integrates this local path-invariant controller with any global tracking controller from the existing literature without path invariance guarantee, ensuring convergence from any position to the desired path, namely, global convergence. This framework guarantees path invariance and robustness to sensor noise. Detailed simulation results affirm the effectiveness of the proposed scheme.
Motion Planning for Hybrid Dynamical Systems: Framework, Algorithm Template, and a Sampling-based Approach
Jun 03, 2024



This paper focuses on the motion planning problem for the systems exhibiting both continuous and discrete behaviors, which we refer to as hybrid dynamical systems. Firstly, the motion planning problem for hybrid systems is formulated using the hybrid equation framework, which is general to capture most hybrid systems. Secondly, a propagation algorithm template is proposed that describes a general framework to solve the motion planning problem for hybrid systems. Thirdly, a rapidly-exploring random trees (RRT) implementation of the proposed algorithm template is designed to solve the motion planning problem for hybrid systems. At each iteration, the proposed algorithm, called HyRRT, randomly picks a state sample and extends the search tree by flow or jump, which is also chosen randomly when both regimes are possible. Through a definition of concatenation of functions defined on hybrid time domains, we show that HyRRT is probabilistically complete, namely, the probability of failing to find a motion plan approaches zero as the number of iterations of the algorithm increases. This property is guaranteed under mild conditions on the data defining the motion plan, which include a relaxation of the usual positive clearance assumption imposed in the literature of classical systems. The motion plan is computed through the solution of two optimization problems, one associated with the flow and the other with the jumps of the system. The proposed algorithm is applied to an actuated bouncing ball system and a walking robot system so as to highlight its generality and computational features.
HyRRT-Connect: A Bidirectional Rapidly-Exploring Random Trees Motion Planning Algorithm for Hybrid Systems
Mar 30, 2024

This paper proposes a bidirectional rapidly-exploring random trees (RRT) algorithm to solve the motion planning problem for hybrid systems. The proposed algorithm, called HyRRT-Connect, propagates in both forward and backward directions in hybrid time until an overlap between the forward and backward propagation results is detected. Then, HyRRT-Connect constructs a motion plan through the reversal and concatenation of functions defined on hybrid time domains, ensuring the motion plan thoroughly satisfies the given hybrid dynamics. To address the potential discontinuity along the flow caused by tolerating some distance between the forward and backward partial motion plans, we reconstruct the backward partial motion plan by a forward-in-hybrid-time simulation from the final state of the forward partial motion plan. By applying the reversed input of the backward partial motion plan, the reconstruction process effectively eliminates the discontinuity and ensures that as the tolerance distance decreases to zero, the distance between the endpoint of the reconstructed motion plan and the final state set approaches zero. The proposed algorithm is applied to an actuated bouncing ball example and a walking robot example so as to highlight its generality and computational improvement.
HySST: A Stable Sparse Rapidly-Exploring Random Trees Optimal Motion Planning Algorithm for Hybrid Dynamical Systems
May 29, 2023This paper proposes a stable sparse rapidly-exploring random trees (SST) algorithm to solve the optimal motion planning problem for hybrid systems. At each iteration, the proposed algorithm, called HySST, selects a vertex with the lowest cost among all the vertices within the neighborhood of a randomly selected sample and then extends the search tree by flow or jump, which is also chosen randomly when both regimes are possible. In addition, HySST maintains a static set of witness points such that all the vertices within the neighborhood of each witness are pruned except the vertex with the lowest cost. Through a definition of concatenation of functions defined on hybrid time domains, we show that HySST is asymptotically near optimal, namely, the probability of failing to find a motion plan such that its cost is close to the optimal cost approaches zero as the number of iterations of the algorithm increases to infinity. This property is guaranteed under mild conditions on the data defining the motion plan, which include a relaxation of the usual positive clearance assumption imposed in the literature of classical systems. The proposed algorithm is applied to an actuated bouncing ball system and a collision-resilient tensegrity multicopter system so as to highlight its generality and computational features.
A Rapidly-Exploring Random Trees Motion Planning Algorithm for Hybrid Dynamical Systems
Oct 26, 2022This paper proposes a rapidly-exploring random trees (RRT) algorithm to solve the motion planning problem for hybrid systems. At each iteration, the proposed algorithm, called HyRRT, randomly picks a state sample and extends the search tree by flow or jump, which is also chosen randomly when both regimes are possible. Through a definition of concatenation of functions defined on hybrid time domains, we show that HyRRT is probabilistically complete, namely, the probability of failing to find a motion plan approaches zero as the number of iterations of the algorithm increases. This property is guaranteed under mild conditions on the data defining the motion plan, which include a relaxation of the usual positive clearance assumption imposed in the literature of classical systems. The motion plan is computed through the solution of two optimization problems, one associated with the flow and the other with the jumps of the system. The proposed algorithm is applied to a walking robot so as to highlight its generality and computational features.
Hysteresis-Based RL: Robustifying Reinforcement Learning-based Control Policies via Hybrid Control
Apr 01, 2022

Reinforcement learning (RL) is a promising approach for deriving control policies for complex systems. As we show in two control problems, the derived policies from using the Proximal Policy Optimization (PPO) and Deep Q-Network (DQN) algorithms may lack robustness guarantees. Motivated by these issues, we propose a new hybrid algorithm, which we call Hysteresis-Based RL (HyRL), augmenting an existing RL algorithm with hysteresis switching and two stages of learning. We illustrate its properties in two examples for which PPO and DQN fail.