 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling and analysis of driver behavior under shared control through weighted visual and haptic guidance
Oct 07, 2020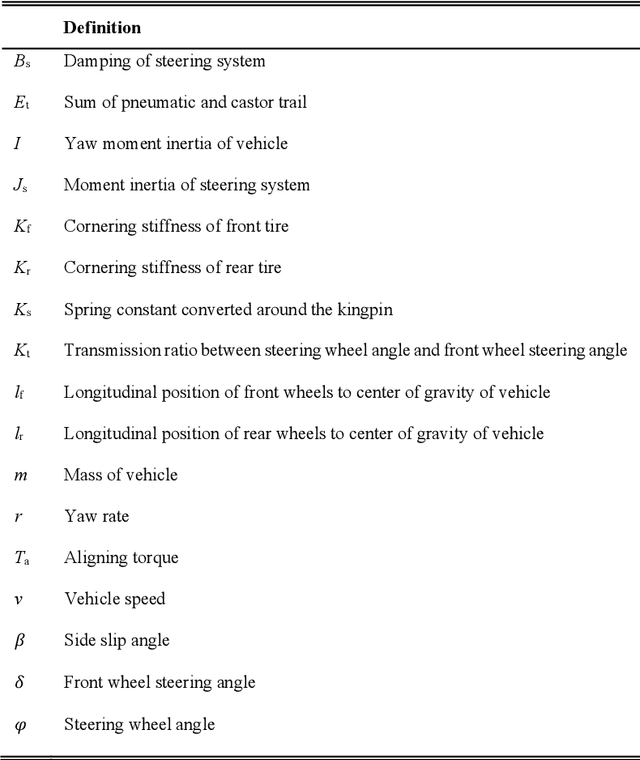
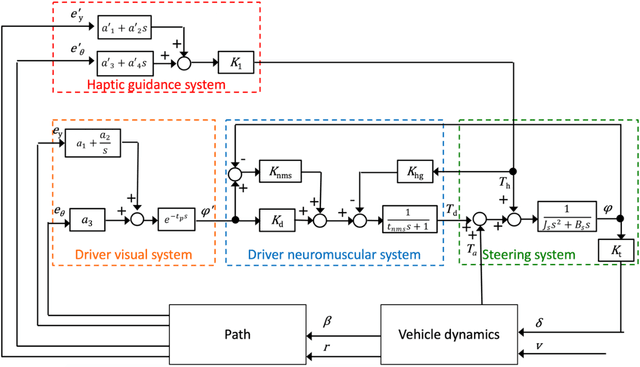
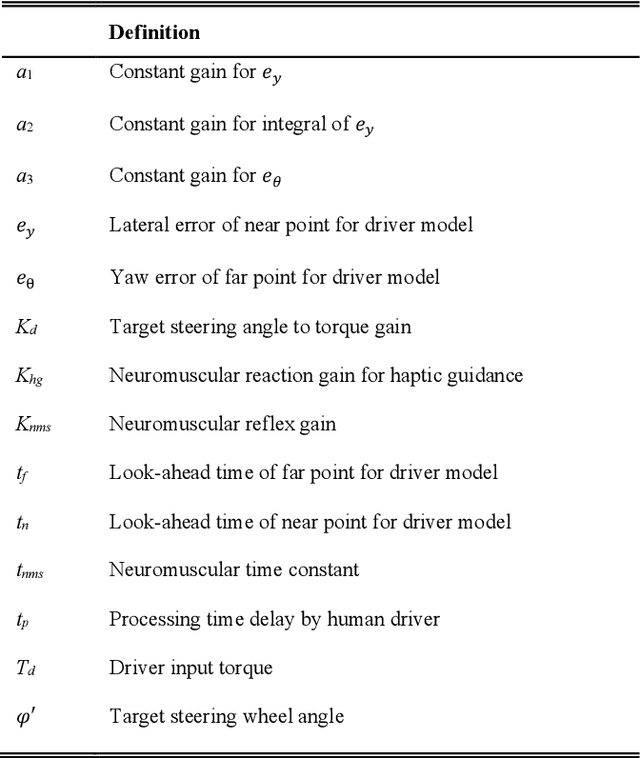
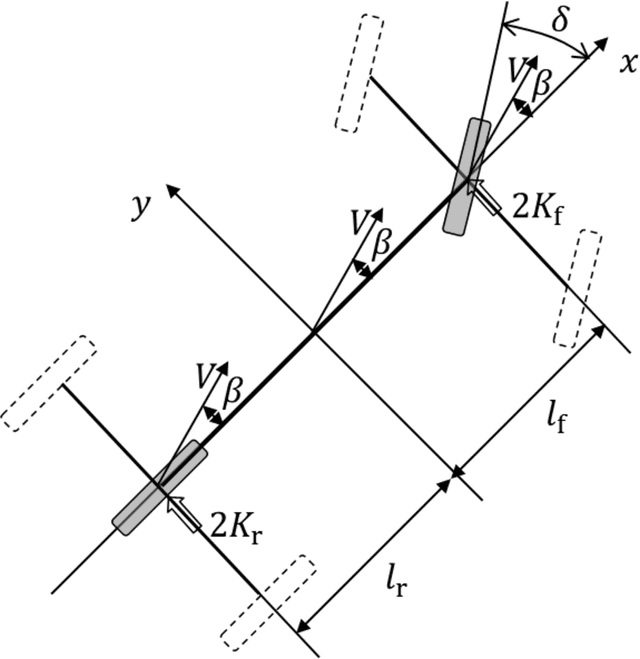
For the optimum design of a driver-automation shared control system, an understanding of driver behavior based on measurements and modeling is crucial early in the development process. This paper presents a driver model through a weighting process of visual guidance from the road ahead and haptic guidance from a steering system for a lane-following task. The proposed weighting process describes the interaction of a driver with the haptic guidance steering and the driver reliance on it. A driving simulator experiment is conducted to identify the model parameters for driving manually and with haptic guidance. The proposed driver model matched the driver input torque with a satisfactory goodness of fit among fourteen participants after considering the individual differences. The validation results reveal that the simulated trajectory effectively followed the driving course by matching the measured trajectory, thereby indicating that the proposed driver model is capable of predicting driver behavior during haptic guidance. Furthermore, the effect of different degrees of driver reliance on driving performance is evaluated considering various driver states and with system failure via numerical analysis. The model evaluation results reveal the potential of the proposed driver model to be applied in the design and evaluation of a haptic guidance system.
Image Fusion via Sparse Regularization with Non-Convex Penalties
May 23, 2019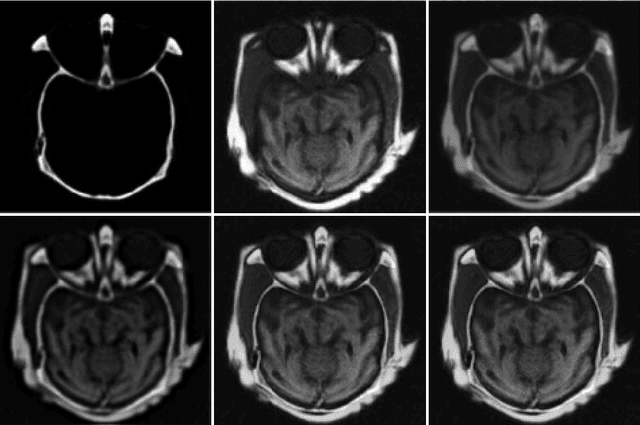
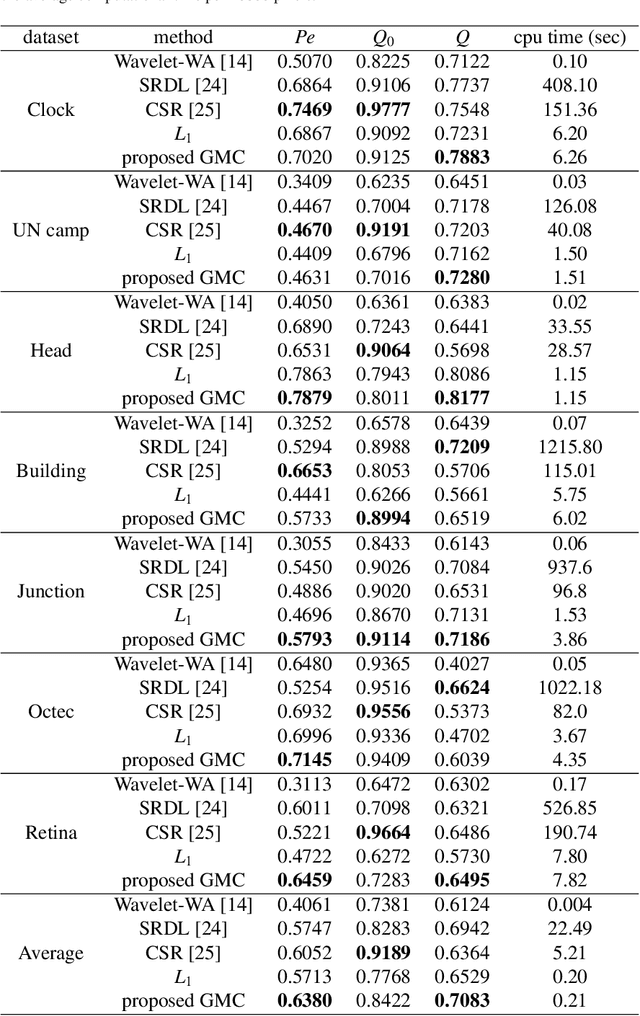
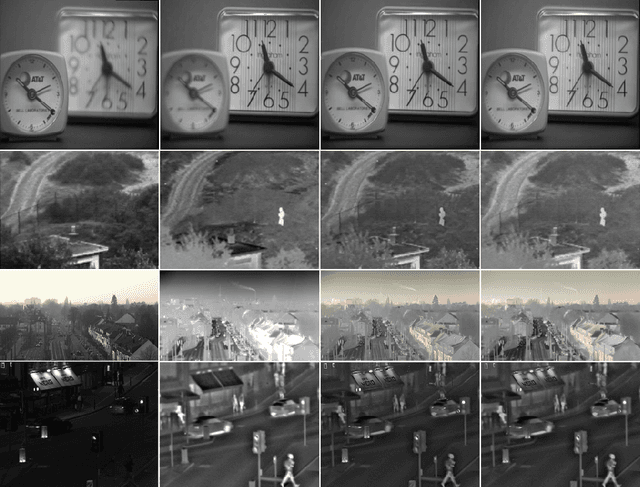
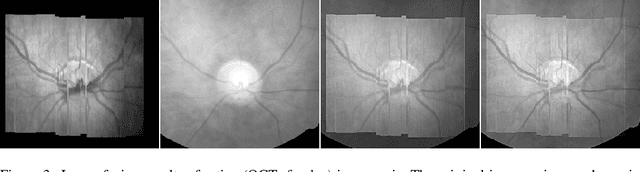
The L1 norm regularized least squares method is often used for finding sparse approximate solutions and is widely used in 1-D signal restoration. Basis pursuit denoising (BPD) performs noise reduction in this way. However, the shortcoming of using L1 norm regularization is the underestimation of the true solution. Recently, a class of non-convex penalties have been proposed to improve this situation. This kind of penalty function is non-convex itself, but preserves the convexity property of the whole cost function. This approach has been confirmed to offer good performance in 1-D signal denoising. This paper demonstrates the aforementioned method to 2-D signals (images) and applies it to multisensor image fusion. The problem is posed as an inverse one and a corresponding cost function is judiciously designed to include two data attachment terms. The whole cost function is proved to be convex upon suitably choosing the non-convex penalty, so that the cost function minimization can be tackled by convex optimization approaches, which comprise simple computations. The performance of the proposed method is benchmarked against a number of state-of-the-art image fusion techniques and superior performance is demonstrated both visually and in terms of various assessment measures.